

Marvin is a lot faster than Jasper. My wife named him.
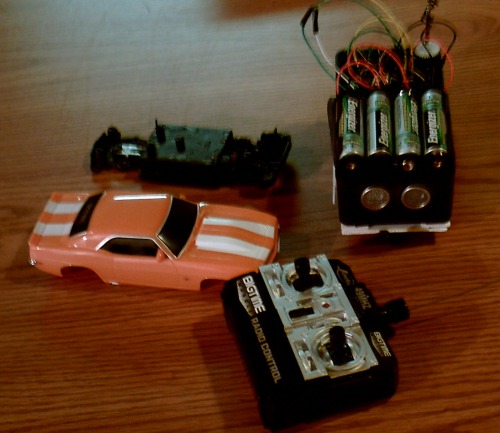
Right now he can just avoid objects with his SRF05 and is able to be controlled with a radio remote. The transmitter and reciever were only 10 bucks at walmart. lol. Just bought a toy car and gutted it for the parts. :D
Right now the radio receiver is not controlling the motor controller directly. It is connected to the analog pins on the Picaxe and controlled programaticly.
The video shows him in both modes. Below are some additional pictures.
Thanks to all who have been helping me!


Update 02/22/2009
Fixed video for LMR logo. :D
Update 02/27/2009 - Considering Marvin complete since I will make the bot I wanna make with the Serializer .NET and C#. :D
Avoid objects and able to be controlled by radio remote, avoids running into walls in RC mode by the SRF05
- Actuators / output devices: 1 Servo, 2 gm10 motors
- Control method: autonomous and radio controlled
- CPU: Picaxe 28x1
- Operating system: Picaxe basic
- Power source: 4.8v Batteries
- Programming language: Basic
- Sensors / input devices: SRF05 Ultra Sound, 47 MHz radio remote
- Target environment: indoors, smooth serfaces.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/marvin

