

As i'm waiting for the last missing parts for my "big" project, i play and make few experiments so i learn new stuff... those days i work on serial communication pc/picaxe, and there it is :

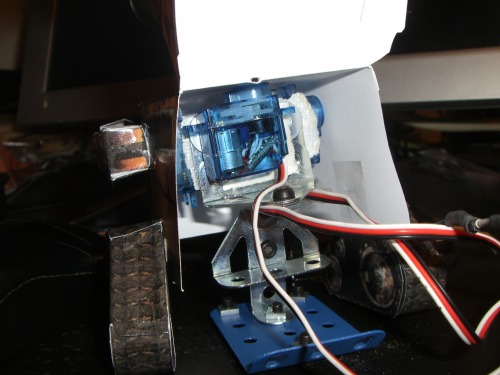
a papercrafted Wall-E (because there aren't enough wall-e on LMR ^^ ) that warns me when i have new e-mails.
It's almost finished but not yet.
For now on one hand i can control it (head and arms) from a small VB software as you can see on the video.
The video is a bit long and not that much interesting, it just shows how it moves. (edit: second video added, see update on the bottom).
On the other hand i already wrote the program which checks my e-mail account using pop3 every X seconds :

So now i just have to mix them and if everything goes well, i'll soon have a small assistant on my desk which will move each time i receive a new mail :)
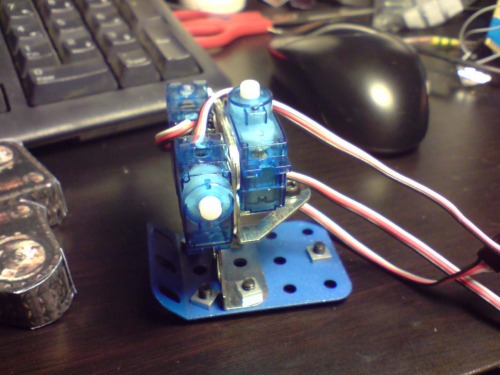
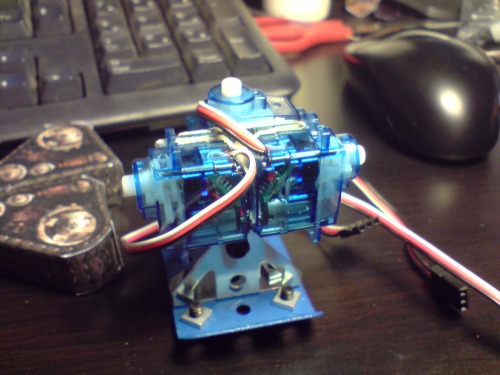
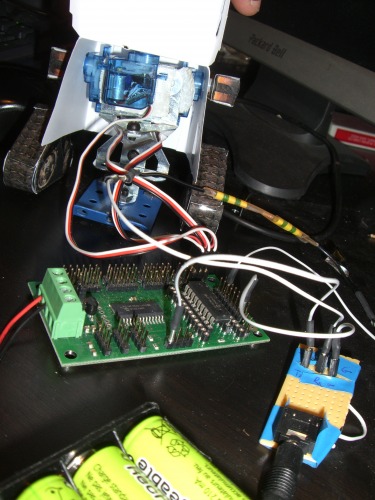
The robot is actuated by three 9g mini-servos, and controlled by a SD21 servo driver and a picaxe 18x... i know, it's a bit like killing a mouse with a rocket launcher, it's just that i want to get used to the board before building my next robot, but i have to order a bunch of 08M for that kind of experimentation, as soon as i get them i'll do the brain transplantation (and maybe try to fit everything in the robot, but there isn't much space). If i have the time, i'll add wireless communication (i just received the cheap sparkfun modules) so i won't have to put it next to my computer.
Here are few pictures of the inside, 3 servos, some meccano and double-sided tape :
UPDATE 17/09/09
I added a new video, I mixed the programs and that's it, now i have a small assistant that scares warns me when i receives a new mail! And i realized something, that by analyzing the content of the mail (exp., subject, body etc...) in the VB program i can send different commands to therobot... meaning that i can control it from anywhere, just by sending an e-mail :D
Well, even if i'd like to make some improvements, like make something to house the batteries and pic, modify the movement sequence when the mail arrives, or make it wireless, i consider this project finished for now as i now want to move on my other project and therefore need my SD21 board. But I'll sure come back to it some days!
UPDATE 20/09/09
Thanks to Rudolph who helped me find the LMR RSS feeds, Mail-E now warns me when the front page of LMR changes...
No video since a robot update doesn't seem to modify the RSS (only new robots), so for now here the new program interface :
with a different sequence of movements so i can tell if it's it's a new mail or a change on LMR...:)
And someone who often has good and creative ideas and who recently played with a LCD screen suggested me that i could add one as a front panel to give the details i now display on my computer screen (exp. and subject for e-mails,title and author for LMR rss... that's definitly something i'll think about...
is cute, warns me when i receive a new e-mail
- Actuators / output devices: Three 9g mini-servos from DAGU
- Control method: serial-controlled by my pc
- CPU: picaxe 18x
- Operating system: Windows for the software part
- Power source: 4 AA batteries
- Programming language: Basic, Visual Basic .Net
- Target environment: my desk
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/mail-e-a-mail-checker-robot-now-also-checks-lmr-rss


