The photos are appreciated and finally realized that you have the older SSC-32 as opposed to the SSC-32U. My apologies if it was mentioned. The SSC-32 was actually discontinued quite some time before FlowArm came out (it was finally discontinued in 2014).
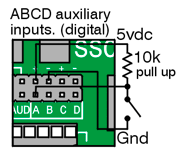
Can’t quite follow the wiring between the VEX switch and the board to catch if there may be issues, but the image above shows how to connect a normally open switch to pin A using a resistor. As per the guide:
The ABCD inputs have both static and latching support. The inputs have internal weak (50k) pullups that are used when a Read Digital Input command is used. A normally open switch connected from the input to ground will work fine. There are two pins that have 5vdc, two pins with ground, and four inputs labled A, B, C, and D.
The row above the four pins are +,-,+,- for 5V, GND, 5V, GND.
We built the circuit as shown in the manual. Tested for logic 0V and 5V with multimeter on the pin A and C. Same results. External signal is not getting to the Flowarm app. You can not associate A, B, C, and D with the sequence. There is no option.
The breadboard circuit is using a optocoupler 4N25 between two Lynx robots so they can talk to each other with their signals. However if the robot is not accepting a switch signal the optocoupler is not going to work.
Looking into it with the original designer to see if the SSC-32 was considered when creating the software. Will get back to you as soon as there’s news. It may be the case that the SSC-32 was simply too old, so was not considered.
If this functionality is preventing you from progressing, are you in a position to upgrade to the SSC-32U? We could look into a small discount too.
Developer’s response indicated that FlowArm PLTW can indeed be easily edited using the FlowBotics Studio software:
This is a bit more involved, so the short answer / solution is to simply opt for the newer SSC-32U which provides access to start specific sequences via pins E to H, and uses A to D as sequence triggers.
You can edit the FlowArm PLTW schematic (using the ‘Edit Selected…’ button instead of the ‘Open Selected…’ button). This will require a little knowledge of FlowBotics Studio though.
Once in edit mode, go inside the 'Arm Control’ module and at the top you’ll see a module called ‘User Programming’. There you’ll see other modules set up for use in triggering from the A,B,C and D inputs.
That may be a bit advanced though. To add the A,B,C and D tags to the menu for tagging sequences, you need to drill further down until you get inside the Sequencer module. Inside the Ruby component code there’s a line:
Thing is B and C are already wired up to start and stop the sequencer so maybe best to leave those out or disconnect them inside the ‘User Programming’ module. It depends what he wants to do.
Unfortunately the .exe program of FlowArm PLTW seems not to include functionality to trigger new sequences on inputs A to D but instead only provides functionality within the same sequence.
We’ll convert this to an internal support ticket to offer additional options.