Hi there!
I hope you want to learn and do some robots because after the course on microcontrollers, I mounted some robots and embedded systems, but I realised I needed to speed up some skills, mainly regarding from phisics to programming regarding robotics.
Yes, after an Engineering degree you can learn everything by yourself, but with a MiT course like “Underactuated Robotics”, it can be much faster and more rewarding! Meeting also new fellows and resources are also other good points.
It’s very interesting the approach they got for this course:
“Robots today move far too conservatively, using control systems that attempt to maintain full control authority at all times.
Humans and animals move much more aggressively by routinely executing motions which involve a loss of instantaneous control authority. Controlling nonlinear systems without complete control authority requires methods that can reason about and exploit the natural dynamics of our machines. This course introduces nonlinear dynamics and control of underactuated mechanical systems, with an emphasis on computational methods. Topics include the nonlinear dynamics of robotic manipulators, applied optimal and robust control and motion planning. Discussions include examples from biology and applications to legged locomotion, compliant manipulation, underwater robots, and flying machines”.
This course starts tomorrow, so let’s see how it’s going…
As the course before about Embedded Systems I did, I’ll explain here my experience, will you join it?
1 Like
awesome
I immediately subscribed. I took the payed version, some certificate may be handy in the future! Thanks for posting this! Carlo
Good see you there!
Hi Carlo!
Nice to know you are interested on it! Gaining any certificate can be good for your future.
I hope we can learn some good things about robotics with these guys  Let’s share our experience here!
Let’s share our experience here!
Kind regards,
Francisco
This looks really cool!
This looks really cool! Always interesting when trying to go to the next level. (At least for me!)
Let’s see if I can put in a couple hours per day for this. I did try out the Physics Mechanics, and the Python course. (though I didn’t manage to complete any of the two). Now that many seem to be in for this one, hope there are no excuses this time!
Thanks for posting Francisco! ( I do follow edX courses but had been away for a while. Looks like you dragged me back in :P)
I must say that I was
I must say that I was intrigued. So much so that I registered to audit. Watched the first video and now I’m even more intrigued 
Thanks for sharing this, Francisco
Good!
Hi Enigmerald!
Long time without seen you 
Yes edX and other Mooc platforms are doing a very good job, so they offer very interesting courses. Actually it’s not about whether there is any interesting course, but WHICH course to do.
I hope to see you also there, and have fun!
Me too!
Yes Aniss,
I though what underactuated must be for a robot? I also thought that the MiT people don’t waste their time nor money on not useful stuff, so I registered to check the course from inside. Now I saw the first video too, and it looks even more interesting. It’s a very new approach of robotic’s control to me, so let’s see how the hell they do!
Thanks for commenting Aniss
Hi all,I thought that we
Hi all,
I thought that we might use this thread to ask eachother questions about the course materials. Is that OK with you Francisco?
Anyway I started reading chapter I of part I of the text material, and I must admit I got a bit lost in section 1.2 (called “Definitions”).
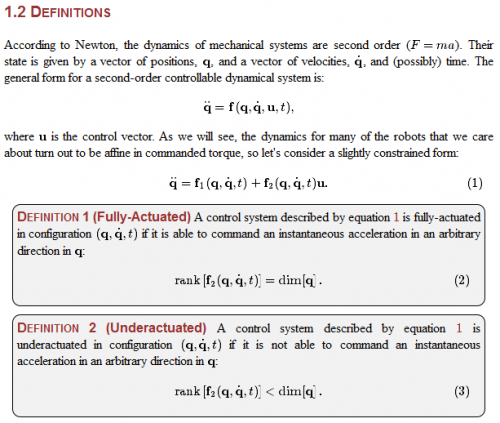
1st off... I'm not too clear about what "second order" means in this context, even after googling it. 2nd... I didn't know what F=ma meant (since there is no explanation), but it is Newton's 2nd law of motion, where F is the net force applied to a body, m is the mass and a is the accelaration.
Anyway what really bothers me is the next bit: "Their state is given by a vector of positions, and a vector of velocities...".
I know a vector can describe a position or a velocity (singular), but MULTIPLE positions/velocities (plural)?
Anyway I suppose the following simply means that the state of a mechanical system is a function of the mentioned vectors + time (t) + a control vector (u) (whatever that means... I suppose it means the movements we apply to the system. In the case of robots via motors/servos):

The rest is pretty much jibberish to me, starting with the term "affine in commanded torque" and then the formula:

I suppose this means something like.. The state of an underactuated system is the sum of two functions (f1 and f2) where the first is determined solely by natural dynamics/laws out of our control (hence no control vector). Why the control vector is multiplied by the second function rather than being a parameter of the function beats me though.
Anyway I hope that we can figure these things out together, otherwise I'm pretty lost if THIS is all the explanation we get...
thought questions
Hi Aniss,
First thanks for asking! My intention is to share between us about this course and it’s advancements for our community. Anybody can access to this course online with the edX platform and get all the info.
I didn’t check yet this material, and I’m sorry that I can’t fully help you with your questions. I do suggest you to ask to lecturers through the course’s forum so all students can benefit from your question and their answers. Please let here the link to your forum’s question so we can follow it. Thanks!
Kind regards,
Francisco
Those are my guesses:By
Those are my guesses:
By “vector” they actually mean any tuple (a set with an order). In this case those can as well be tuples of vectors, or of functions, or of sets, etc…
The symbols they use, such as F, m and a, are not necessarily scalars. Here they are talking about a second-order function, so a function that takes functions as the parameters, and returns a function.
Affine means it doesn’t deform – that is, parallel lines remain parallel.
I’m not sure if the operation between f₂ and u is multiplication or function superposition, or something else…
Oh, they use “matrix” and (linear) “function” interchangeably here, so a second order function is actually a function that returns matrices.
Hi Deshipu,Thanks for giving
Hi Deshipu,
Thanks for giving me some input on this. I also thought that by “vector” they might mean a vector (or tuple) of vectors, which in this case could make sense. But I’m not sure.
BTW I actually wanted to recommend this course to you in particular, since it goes very well with the stuff you’re doing. Anyway registering to audit is free so you can just check it out.
Hi again Francisco,Yes
Hi again Francisco,
Yes eventually I’ll post my questions there. I just thought I’d start here in this case because I didn’t want to be the first person to ask questions about the text material in the course forum. So far the only questions there are about installing Matlab and the likes.
Sorry about filling up your thread with math questions…
Don’t worry…
Hi Aniss,
Don’t worry for asking, we are here to share and help. I think it’s just a question of practicity in this web, to cover general questions on robotics, and let the specific ones to the topic sites like the maths for this course. Actually I didn’t checked out the material you asked. After revising it I realized I have to do a review/improvement on my advanced mathematics knowledge oriented to robotics of course. What I mean is, I have a gap between my actual knowledge on differential mathematics and the mathematics the are handleing right now… I’ll ask for tips in the course’s forum
"second order" means to second derivate of a point in space over
"I’m not too clear about what “second order” means in this context,"
Hi Aniss.
“second order” means to second derivate of a point in space over the time. The “zero order” is the position itself p(t). The “first order” is the derivate of position over the time: velocity v(t) = d p(t)/dt.
The second order is the derivate of velocity, the acceleration: a(t) = d v(t)/dt. Thus, F=ma address to use of acceleration, the second order of position of a point in the space.
Sometimes, instead use of notation d f(t)/dt, is used a point in the “head” of the function to denote a derivate. For example, a “q” with 2 points above " ¨ " is the second derivate of function “q”. A single point refer to first derivate of “q”. You can find a lot of information of functions and derivates in any good book of calculus. A guess there are good online courses about this in coursera or edx platform. Best regards.
I just signed up also
Though just to audit,
My user ID is DJayNewman.
Nice to know!
Hi Dangerous!
Good! Today they should publish the first course chapter, let’s see…
Update info on the course
Hi again Aniss,
Today they published the first week material on the course. There are some good definitions and reviews on robotic’s maths, let’s. You can have a look here:
https://courses.edx.org/courses/MITx/6.832x/3T2014/courseware/week1/week1_lecture1/
How is the course going
How is the course going LMRians? I found the math to be a bit on the hard-side and couldn’t make it through to the first week. At least there’s a free MATLAB license for a while to tinker around with MATLAB for sometime.
The course is not going…
Hi Enigmerald,
Even I followed the course the first week, I found I needed a quite important update on maths also a training on matlab. As I have already other projects running, I will just audit the course as I can but not finishing it now. Maybe it could be for the edition… Until now I already gained some new sights on underactuated robots and other topics that can be interesting for some projects. Let’s see…
Still going strong
Yes the course is hard, very hard. But I persisted and now it feels I am in control a bit more. It is really fun.
I am not spending as much time on the SB as before because the course consumes all my spare time :D. So see you later guys.




 Let’s share our experience here!
Let’s share our experience here!

