

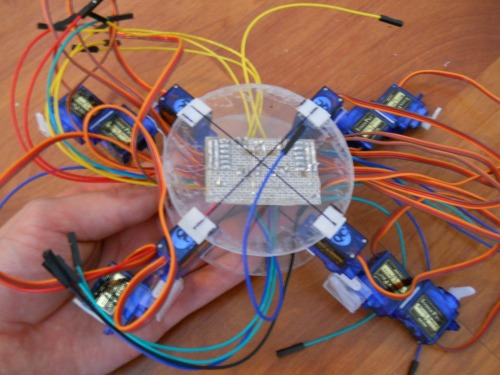
this is the base as you can see, it's not too large (took me a million years to cut the two plastic circles! )
down here I put the second and the third set of servos. I actually ordered 12, but one got broke so now i'm waiting for another. This is a novice mistake, to know for the future!

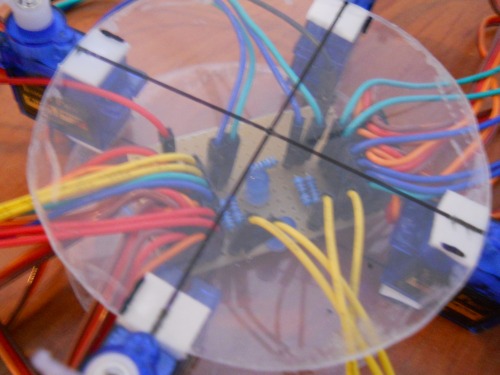
down here I added cables and to communicate with Arduino, and a home made circuit board.
this is the top of the board, there are plenty of wires! At the top of the body there will be the radio-receiver, and the battery holder. At the bottom I plan to put the arduino uno.
Here is another image, it's almost finished. I finished a part of the programming, soon it will be ready for expertimenting:).
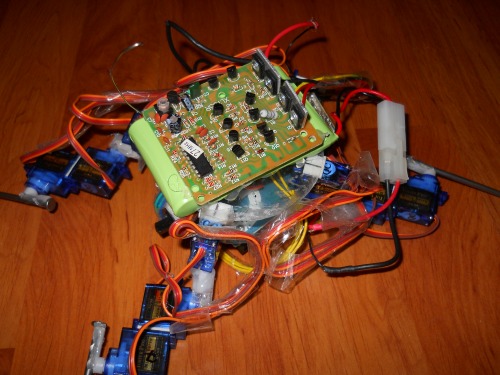
Here is the front, the "abdo", where I put the arduino. There are lots of wires, and that scotch tape doesn't look cool, so I need to buy some things to group them.
I miss a servo right now, I'm still waiting for it, should come monday or tuesday.
Finally, the servo has arrived. :D
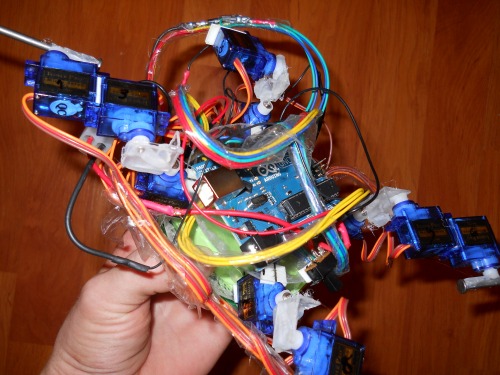
And my robot is finished!
Tadaaa!


Now I made a mistake. ■■■■■ The shoulders, which are attached to the first and the second set of servos, are made of plastic and it bends under the heaviness of the robots. Need to buy 4 wooden blocks, or sth more solid so the robot would finally have the posibility to walk.
This is the final shape of it:
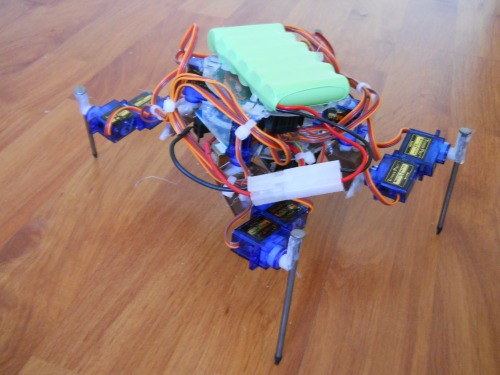
This photo up here shows the robot completely finished. I took off the radio receiver, it didn't work very well, and changed the "shoulders" with a more resistant material:
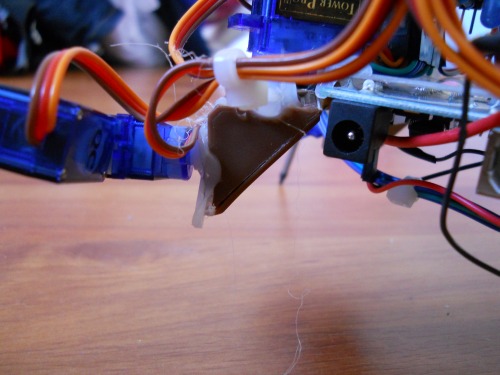
I screw the servos and then stick them on.
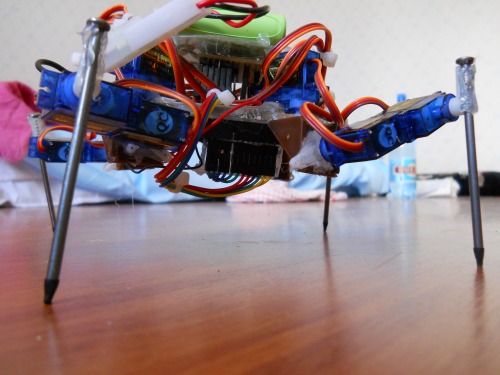
This is an image of the underside of the robot:
I'll buy an RC car, to make the robot to be radio controlled. Until then I'll write the program for walking.
Videos soon ! :D
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/kreis
