

This Robot is based on home-made Aluminium chassis. The size is 40cm x 30cm x 4cm.
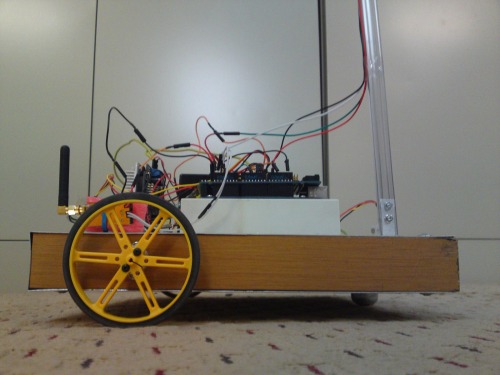
This Robot has the following:
| Seq | Item | QTY | Price |
| 1 | 75:1 Metal Gearmotor 25Dx54L mm HP with 48 CPR Encoder | 2 | $37.00 |
| 2 | Pololu Wheel 90x10mm Pair - Yellow | 2 | $10.00 |
| 3 | Pololu Universal Aluminum Mounting Hub for 6mm Shaft Pair, 4-40 Holes | 1 | $8.00 |
| 4 | IR Sharp sensors | 2 | $16.00 |
| 5 | 9 Degrees of Freedom - Sensor Stick | 1 | $90.00 |
| 6 | APC220 Radio Communication Module | 1 | $54.00 |
| 7 | Arduino Mega2560 | 1 | $56.00 |
| 8 | Arduino Mega Sensor Shield | 1 | $13.00 |
| 9 | 12V 4Ah SLA Battery | 1 | $8.00 |
| 10 | Dual H bridge Motor controller up to 30A for each channel | 1 | $40.00 |
| Total | $332.00 |
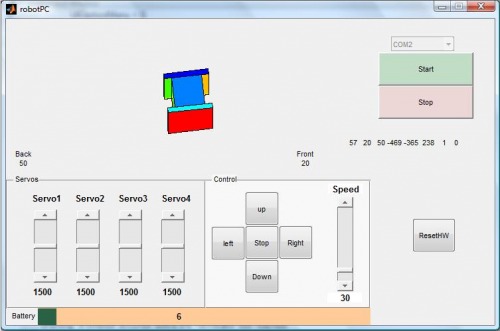
In this phase, the controll is done in the PC (Laptop) using GUI running in Matalb. this software controlls the speed and direction of movement. Also readings of the Different sensors and battery level are transmitted through the wireless to Matalb.
Navigation
- Actuators / output devices: 2X 1:75 6V Geared Motor
- CPU: Atmega2560
- Operating system: Arduino
- Power source: 12v SLA
- Programming language: Arduino
- Sensors / input devices: 9 DOF + Sharp IR
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/kafshabot-with-arduino-mega2560
 Anyway, what do you want to achieve? 700 US$ for that what you showed off here? what a price…maybe you put a zero (null or 0) to much on it?
Anyway, what do you want to achieve? 700 US$ for that what you showed off here? what a price…maybe you put a zero (null or 0) to much on it?