

My name is Rick and have no programming background but have always wanted my own robot after watching the movie Short Circuit. From that time on I said "one day I will have my own robot". Well a job opportunity gave me a resion to buy something to start with and I choose the "iRobot Create". I was traveling away from my family for weeks at a time and wanted a way to be mobile within my home. Searching for ideas I ran accross Johnny Chung Lee's video chat robot. This was great and exactly what I needed at a low cost. It uses just a few parts and was easy to piece together and configure.
Stage One:
I ordered the iRobot Create and luckily my Mother In Law had just given me her old Acer Aspire One Netbook which helped me on the cost. All was needed was a stand to mount the Netbook to the iRobot Create. Again my Father In Law had just given me his old rear speaker stands which look like figure 1. This setup worked out great and allowed the height of the netbook to be adjusted.

I won't get into the software details as Johnny Chung Lee provides the links and details on his site. I never took any photos of this setup not planning on sharing being it was the same as Johnny's. See figure 2 for a quick image to give a visial of what it looked like.
I used this for about a week and the job didn't work out so I came home and put it in the closet to collect dust for a bit.
Stage Two:
Now I have a steady job and decided to find another use for the robot and started researching what others have done with the iRobot Create. It didn't take me long to run across the Turtlebot by Willow Garage. I didn't want to buy the platforms when I new I had the skills to make them myself. Turtlebot.com provides all the specs in a nice download here which helped me cut my own and have the correct hole line ups.
I cut the platforms out of some old wood paneling I had in garage. Sturdy enough but still light weight and painted them black just for a better look. I went to my local hardware store to see if I can find some long standoffs with no luck. I've seen others makeing their own by buying some solid aluminum rods then drilling them out on the ends. I didn't want to take the time to do all that so I found some treaded rods and used nuts to space the platforms out.
See figure 3
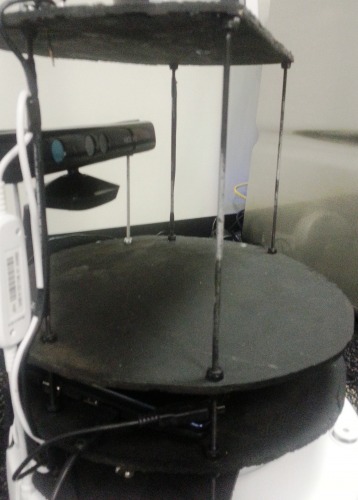
I got lucky again and was able to borrow an xBox Kinect to complete everything I needed to experiment with the Turtlebot software supported by the ROS (Robot Operating Software) community. I loaded Ubuntu 12.4 on my netbook and installed the ROS Hydro Software. Then the next step was to install the Turtlebot Distributions. Now I was ready to launch the software and see the robot in action. The ROS community has provided several pre-loaded actions the robot can do in the turtlebot distributions. This was awsome being I don't know how to program code yet. At least it gave me something to start with.
I'm lacking the gyro sensor that was sold with the Turtlebot. This is keeping me from being able to use the SLAM mapping software to map out my environment. This is something I really want to do but for the life of me can't seem to find a gyro to buy. The gyro I was pointed to in the past from Sparkfun.com has been retired and I haven't been able to find another that matches the specs. :(
Stage Three:
I know there is a lot of things that can be done with ROS but my lack of programming skills is holding me back. So being bord I started to look for other ideas/robots and stumbled accross Loki built by: Dave Shinsel. Loki is an awsome robot that has the ability to do just about everything you would want your robot to do. Dave is kind enough to share all his code and schematics to be able to built a robot like Loki. I've been taking some of his design ideas and adding them little by little to my turtlebot.
First I made a head from two 6 volt flash lights then mounted them together using a Triple Zinc Post Anchor 4" X 4". I removed the bulbs from the flash lights and glued a Quick 5.0 MP WebCam in both to give the robot Stereo Vision capabilities. See figure 4. I don't have these working at this time. I'm just peicing things together and will get everything working as I learn to program it.
I used the bigger flash lights because my goal is to find a used electric wheelchair and convert it to be my motor base and build a body with arms like Loki which would make my head more scaled to size. I want to use a wheelchair because it can handle a good payload with good torque to go through most terrain.
I grabbed the speaker stand that I used on the video chat setup and mounted it on top of the platform I made from wood paneling. See figure 5. Then I mounted the head on top of the speaker stand. My next step is to add servos so that the head can pan and tilt. Again I'm copying the configuraton from Loki. Dave's code allows Loki to track faces and its arms using the stereo vision from the webcams. This would be a cool feature to have around my office to interact with my co-workers.

I added the speakers to amplifie the sound from the netbook.
My plan from here is to learn to program and keep adding to the robot as I can afford it. My ideal goal for my robot is to have the following capabilities:
- Autonomous Navigation of my office
- Face Recognition
- Speech Recognition - Command movement and Apple's Siri type responses
- Link to my companies intranet to allow inventory lookup request using speech recognition
- Capability to retrieve said invetory from shelves and return it to me
I hope my project and thoughts help someone with their first robot. Sorry for the lack of programming advice. My lack of programming skills is one of the main reason I decided to join LMR and share where I'm at with my bot. I hope that I can learn from the community and others will help me get to my goal.
Follow, Navigate, Remote Controlled
- Actuators / output devices: iRobot Create Motor Base
- Control method: semi controlled, Client/Host Controlled
- CPU: Intel Atom 1660.0 MHz
- Operating system: Ubuntu 12.4
- Power source: 14.4V 3300mAh NiMH Battery
- Programming language: ROS
- Sensors / input devices: bumper switch, Webcam, IR sensors, Kinect
- Target environment: indoor, Floor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/irobot-create-office-bot
