


Here is how I've modified cheap e-bay servo for continuous rotation,
Thanks to Oddbot for his explanations :)
Servo is a SG90 , equivalent to HXT900... and many others
Tools you will need : A sharp knife, a PH0 screwdriver, some sandpaper, soldering iron (or glue)
+ Nice to have : A microcontroller that continuously sets the servo to its center position ( 1.5 ms , position 150 on picaxe)
below : the package I recieved from Hong-Kong (about a week after the order was placed)

Step 1: Cut the stickers and remove the 4 screws

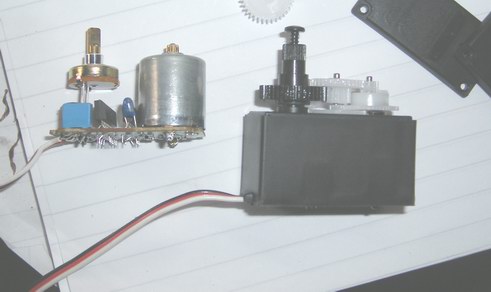
Step 2: Gently remove all the gears (remind that you will have to put them back !!!) and Pull the circuit away

Step 3: Push the potentiometer out of its casing (as you can see, the output shaft is the potentiometer itself)

Step 4:
Connect the servo to your controller
The motor will rotate until you put the POT to its exact center position.
When the motor stops, you have found the good position, DO NOT disconnect the controller for the moment

Step 5 : SOLDER (yes SOLDER!) the shaft of the POT, from the back
Oddbot recommends to use hot-glue
If you decide to use glue, you will have to remove the white plastic cover sheet of the shaft-side, then fill with some glue

The shaft will never be able to move again, try to make sure... and power-off the controller if OK.
Then put the POT back to its casing

Step 6 : It's time to make the shaft thinner. (the outer gear as to turn freely)
I use sandpaper.

Step 7 : Cut the "stop finger" of the output gear

Step 8 : The finger is far away now, identify the 'notch' that prevents the gears to turn around its shaft.

Step 9 : I've used one of the screws to drill the notch out,
Then I've used the same screw to drill the plastic gear (Not sloppy on the shaft --> just be sure that it can turn with ease)

Step 10 : Put all the gears back to the shafts

Step 11 : You can put everything back together

Step 12: Write some code to test... and enjoy ;)
(note that servo0 is used to center the POT , and servo1 is used to test turning forward then backward for 3 seconds)
main:
servo 0,150
servo 1,100
pause 3000
servo 0,150
servo 1,150
pause 1000
servo 0,150
servo 1,200
pause 3000
servo 0,150
servo 1,150
pause 1000
goto main



 I just got the idea yesterday, when I was looking at an old PCB with two smd trimpots. I’ll modify no. 2 later today and maybe post a picture or two.
I just got the idea yesterday, when I was looking at an old PCB with two smd trimpots. I’ll modify no. 2 later today and maybe post a picture or two.