Im having trouble
Im having trouble understanding too. Its prolly cause i have no idea what im doing.
Isnt the Z-axis the length from the floor to the top of the coxa
In neutral position its 65mm from the floor to the top of the coxa.
Whats the difference between the z-offset and z-axis?
**Thank you so much.
Your**
Thank you so much.
Your diagrams are super helpful. Would it be at all possible to make another diagram using your bot or another to show the above diagram in real world like you have above?
Ok seriously!!! I want my
Ok seriously!!! I want my bot to work!! I have checked on other sysyems but my bot is not compatible so i have to learn to do this!!!
I would really like to use oscars tutorial.
I have already worked out the gamma or the tangent.
The next step is to work "L". Plain english! Can we figure out how to solve the problem above. We can work on theory later. First i need to understand how to solve the equations. Implementation can be learned later.
Please im seriously begging and desperate at this point!!!!!! Name price or what ever!!! Just help me!!
So to find “L” i need to
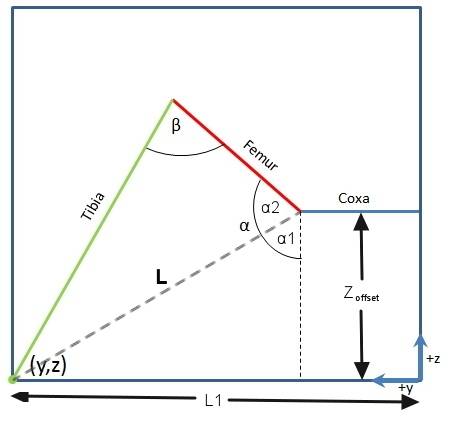
So to find “L” i need to square the z-offset then add the difference of the length of the coxa minus the L1 which is the measurement from where the tibia touches the ground to the Z-axis?
I was just trying to solve
I was just trying to solve it following the rules of an algebric equation.
Quote "The 2 superscript to the Zoffset (not axis) is the square function AND the 2nd power (they're the same thing)."
I then assumed that the square root sign and the zoffset were the same thing.
This cant be that hard!!!
Seriuosly why can't we say ok take rhis measurement and then do this and then do that. That would be way simpler for me to understand.
So to for find L the first function calls for a sqaure root. Square root of what? Z-offset square? Do i square the Zoffset then get the square root off that
The next function is +( L1 - coxa)2 so what do i do here. What is L1 - coxa? Looks like i subtract a number from L1. The pic shows L-1 as being the length of where the foot touches the ground to the z-Axis.
IK Calculations
The science of IK is relatively new and applications using it on $3.00US computers are scarce. Oscar Lang did publish solutions and then made them available by subscription only. I don’t know the current status but I suspect you could find the earlier versions or even pay for his current package.
Some general comments:
The mathematics that describe IK are precise, exact and unambiguous.
Your lack of understanding the theory or scientific notation does not entitle you to make outrageous claims.
To use this notation you will need to adapt YOUR methodology.
You are free to invent your own notation. Perhaps when you earn a PHD in IK we will remember you humble beginnings.
We were trying to help you.
The only outrageous claim i
The only outrageous claim i have made was that this cant be as hard as yall are making it out to be to do it. Im not asking for the solution. Im asking for your help in getting the solution. So far i have asked straight forward questions. I figured out the tangent part but i cant get a straight answer on what to do next.
If your trying to help then tell me what to do.
What do i do with the first part of the equation. Straight up. In english. What do i do with the first two functions?
What measurement do i need to know to start the problem of?
Once the first two functions are solved what do i do next.
I understand that IK is precise and unambiguous but why cant i get a straight answer about it.
Again i will ask one more time. In plain english.
How do start to solve the eqation? 1st step first then the second then the third, etc.
I will learn what its doing as i learn To solve the problem,
Maybe im asking the wrong
Maybe im asking the wrong question. Im supposed to be finding Alpha one. In order to do that i need to know how start off the equation.
What is the first step? Just the first.
Ok my Z-offset is at 30mm
Ok my Z-offset is at 30mm from the ground level. When i try to calculate it by either hitting the square root key then typing 30 and hitting the x2 squared key i get a loop of the square root of 30 or 30 squared (900).
Am i supposed to square 30 or get the square root of 30?
What is the "+ (L1 -coxa) squared" telling me to do?
Sorry guys, having a bad day and spoke out of place. I do appreciate your guys help especially Duane who has helped me from day one. I hope yall wont hold it against me. I really do want to learn this but i learn by doing. Any way i apologize.
Thank you Duane fir your
Thank you Duane fir your message. It did help alot.
Gonna take a break from the IK since it was frustrating me so much.
In the mean time im gonna switch back over to the torobot page i have an idea that will at least get it mobile.
Ok you said above that L1
Ok you said above that L1 will depend on where i want the foot to be located. Does that mean ill have to solve the equation for every move i want to make?
So when i move leg 1 to its forward position and i want to bring the foot in ill have to solve the equation over and over?
Is there a program for the
Is there a program for the NED coordinate system you use? If not can you link me to some info?
Ok what coordinate system
Ok what coordinate system would you reccomend?
Ok so im trying to
Ok so im trying to understand right. Now when i start calculating positions, for example if i want to move the left middle leg, i do a calculation at neutral then i put the leg where i want it to go then measure again and then do a second calculation. Do i have to do the same thing for each degree of movement in between or just to the place i start and the place where i want the leg end up.


