

_____________________________________update 2012,01-05
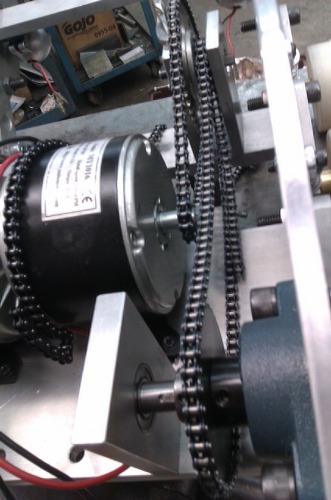
I add another 11:33 chain to reduce the speed and increase the torque. Much better decision and satisfied with the result.
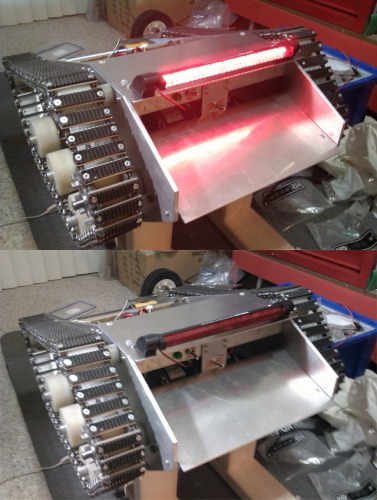
Add up the back light.

Interior also changed too because the mount plate and spacing had been modified.

Just for show :P
_____________________________________
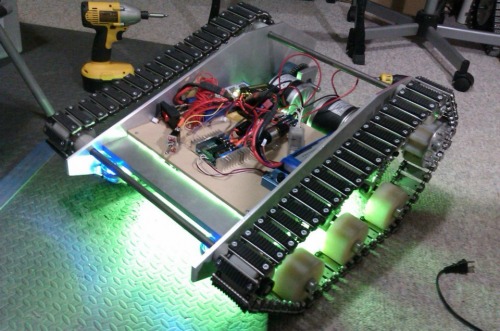
After my first track machine M.T.M.P. I got 2 extra belts left and hanging there for months because I thought it was failure. Since spend weeks just to made those pure hand made belt I decide to give it another shot. This time I was trying to use brushless motors to drive this machine and after couple tests the result was too weak torque to start the heavy chassis so I replace 2 scooter motors instead. And again, I am not too good to describe the thing in any language so I will let photo to say it out.
My friend is running a machine shop so I ask for his help to create some parts that I can't complete at home and sometime I just borrows his equipment to make these parts.




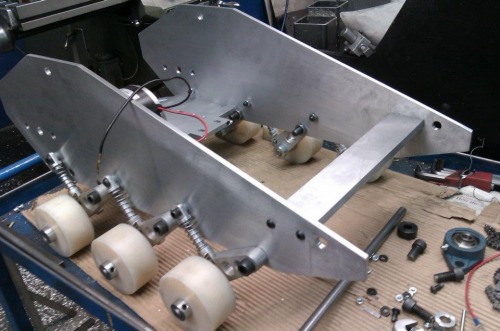
This is the second attempt to made these 2 driving wheel. I was using the middle one(white strong plastic) in first attempt but the gap in between the track plate is not precise(hand made). So I came up another idea to using the bolt and nuts on belt to drive it.


Cut the plate and replace the motors.
The bar was from LEGO tetrix for mounting boards

Use Arduino, Sabertooth 25x2 and 30A fusesx2

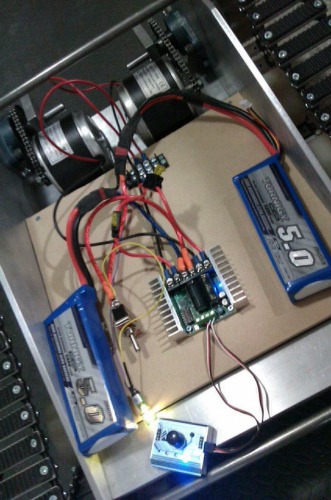
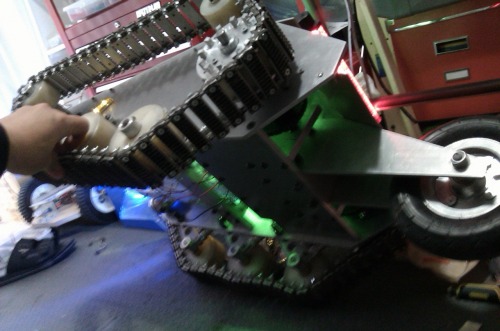
Adding some lights for show :P
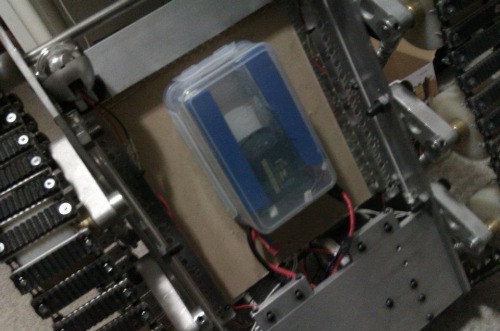
Use the plastic clip box to store batteries:


Try to add a supporting wheel at back to prevent flipping when climbing up hill. It lift in the air on flat ground so it won't causing the the problem when amke turns.Well, maybe a stupid idea, who knows?



Replace to wood board to polycarbonate for better water proof inside. Also add on the front panel.


Well that's what I got so far by Dec, 2nd 2011. And Actually I am running a problem about the power and torque again. Or maybe my program but I assume its the current might too high that trigger the protection from controller board that shut the power when I start the machine. Especially when I start it slowly, maybe it reach the limit when extreme torque needs. So the situation is like: Start to run for 1 second and it stopped or reset? then the power is back again. Currently I power up the Arduino from controller board with 5V. Maybe that's why the power been cut off and restart by controller board so as Arduino itself. Right now I really not 100% sure where the problem might be. Hopefully some of you might give me some hint or ideas how to investigate this issue.
I might change the bigger sprocket so the machine runs slower and easier to pump the torque up and so it won't suck too much juice when start. Well, not very profession but hope you enjoy it.
- Actuators / output devices: 11T 36T sprocket #25 chain, 2x 24V 300W motors
- Control method: Custom made RC
- CPU: Arduino
- Power source: 3x 11.1V Li-po battery
- Target environment: Indoor or outdoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/hell-o-kitty
 Thanks for sharing and I’m sure you will get help here.
Thanks for sharing and I’m sure you will get help here.