

Harvey is a Wild Thumper based surveillance robot intended to operate outside. Future plans are to be able to patrol my backyard with wireless video transmitted back to a video recorder/monitor. Ultrasound sensors for forward object detection, GPS for waypoint navigation, accelerometer/gyro/magnetometer (IMU), and of course a small analog camera mounted to the front. Video is transmitted via a 2.4GHz transmitter to the base station (aka my TV). I also want to have a flashlight/headlights mounted that can come on in low light situations. Or alternatively an infrared camera for night vision. Well those are the goals, so we'll see how close I can get to making it reality.
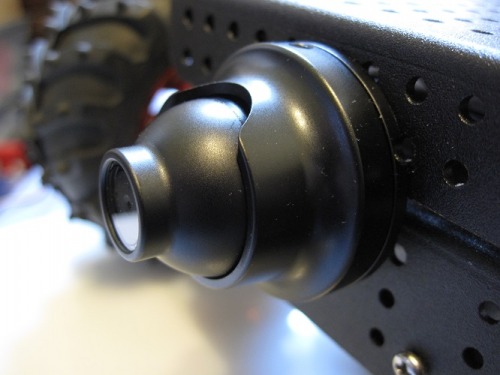

One of the small perks of my job is I often find myself with some cast off surveillance equipment. In this case I've got my hands on a 2.4GHz transmitter and reciever pair, and a small 560TVL mini-dome camera. The camera mounted oh soo easily to the front of the thumper, and the mounting tabs on the transmitter were the perfect spacing to use the four center posts of the upper plate on the thumper. It was like destiny. :) I also have a small infrared camera intended as a backup camera for a car. Unfortuneately the IR illumintators appear to be nonfunctional. I'll have to take it apart and see if it is a simple repair, for now I'll go forward with the mini-dome, which will just be blind in the dark. Both transmitter and camera require 12v power, so I'll have a 3S 2100mAh lipo battery to power them. The camera draws about 150mA, and the transmitter I don't have any solid numbers on, but it came with a 1A power supply. Assuming thats the max it will draw I should get just under two hours run time with both. Real world testing will probably shoot holes in that theory of course.
For motor and sensor control I'm currently using a sparkfun pro micro 5v with one of my undershields. This is temporary, I want to design a new board with the IMU on board, and I'll work in a connection for a gps receiver. The motor controllers are seperate individual units from Pololu. They're the high power 18v25 brushed motor drivers, a fet based driver capable of handling the thumpers motors. Powering the motors and microcontroller will be a 5600mAh 2S lipo pack. I don't have any real idea how much runtime that will give me yet, too many variables to take into account. Will just have to test it in the field (aka my backyard) and find out. My current concern is draining the batteries too low. I'll have to learn how to monitor thier voltages and respond accordingly.
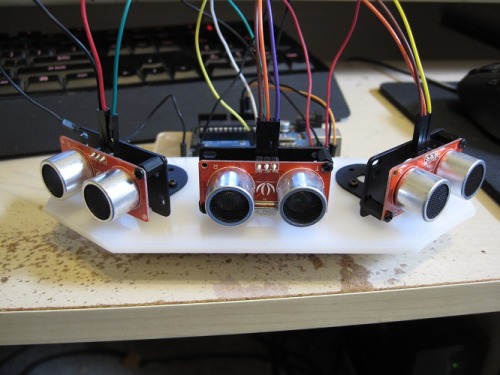
This is the forward array of sensors I'm testing. Three Seeedstudio ultra sound modules. There doesn't seem to be a specific model number, but they seem similar to a Parallax Ping sensor; using a single pin for both transmit and echo. The NewPing library works pretty well with them, and they seem accurate enough for rough forward object detection. They are mounted to a peice of hdpe which will mount to the front of the thumper once I have the hardware in hand.
That's where it sits right now, this 4th of July. While I'm waiting on some misc hardware to arrive I'll work on the wiring harness for the three ultrasound sensors. Early next week I can test it out with just basic object avoidance bouncing around my backyard. Hopefully I'll have some video as well.
Autonimous surveillance of my backyard, eventually.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/harvey
