Another walking robot printed from 3D printer and using Arduino UNO with expansion board and BT. This gorilla type of walker should concider as quadraped but also biped. I build the concept by using Lego Technic and see if this is doable. It seems works O.K. so I start draw parts from SketchUp.
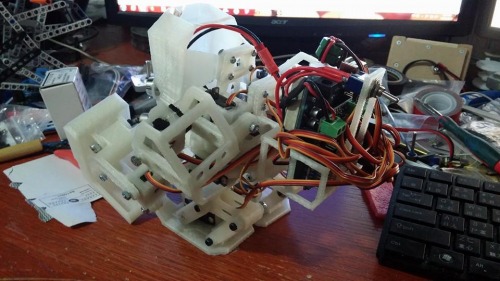
Apparently, it comes out quiet different than the concept one above. I am glad all 9G servos works fine to carry the weight.
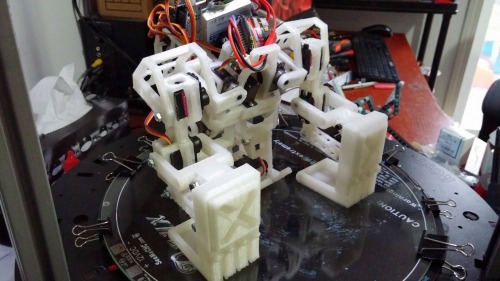
A shot from back. In this design I tried not to use support to print and with lots of 'bridge' in parts. Thanks god everything works out pretty good. Some 'bridge' were kinda collapse or curved but it fixed it self after 2nd or 3rd layer when printing.
Again, I didn't really start to program it yet but try to move servo 'swing' a bit to check if everything works fine. From the video you can see all servo are just swing in between 80~100 degree and it was surprised me it looks like it's really walking. But that's not the way it suppose to walk. I will upload again when I done the programming.
1. I noticed in 1 of the videos that “gorilla dude’s” feet were slipping heaps, and therefore greatly reducing the speed of his movement. Ithought maybe, you could put some sort of grip on the bottom. e.g. rubber
2. It looks really cool, but, just my thought, I reckon you should cover him in some sort of black gorilla fur!
P.S He’d look even more if you made his arms swing a bit more.
( not saying it’s bad or anything, just trying to help) :P
1. I noticed in 1 of the videos that “gorilla dude’s” feet were slipping heaps, and therefore greatly reducing the speed of his movement. Ithought maybe, you could put some sort of grip on the bottom. e.g. rubber
2. It looks really cool, but, just my thought, I reckon you should cover him in some sort of black gorilla fur!
P.S He’d look even more if you made his arms swing a bit more.
( not saying it’s bad or anything, just trying to help) :P
The moment I saw this robot, I thought “what an amazing design for a quadruped robot!”. I was a little bit disappointed when I saw a bipedal gait on the video, but I’m sure you can have several different modes. It really looks great, I hope we will see some more of it soon!