

Second robot in the eyandron series, powered by an Arduino this time, and fully autonomous.
Has the same chassis from the older bot, with a sensor added on the front.
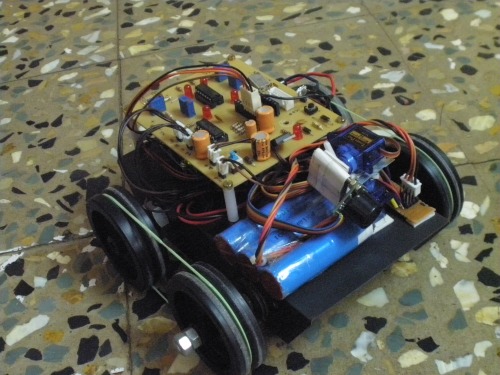
Motors are controlled by an L293D (part of an old PIC development board)
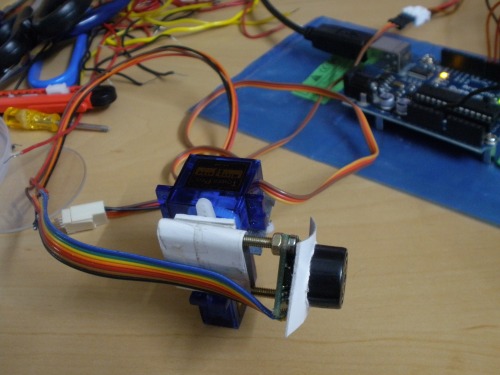
Miniature pan-tilt assembly made out of two miniservos to aim the sensor. (see video#2)
Coding with Arduino is so much fun, I experimented with several codes, and the video shows a program running a "random delay" algorithm.
End result: One lazy, shy and disoriented robot that roams around without a mission. (see video#1)
Roams around via ultrasound
- Actuators / output devices: 12V DC motors
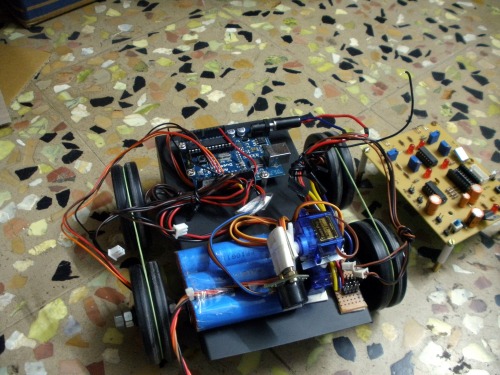
- CPU: Arduino Duemilanove
- Power source: 12.6V Lithium ion
- Programming language: Arduino ide
- Sensors / input devices: Maxsonar EZ1
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/eyandron-2-the-aimless-wanderer