After seeing fritsl's Yellow Drum Machine in action, I decided that I needed to build a robot like that. It just looked so fun and to tell you the truth - it has been. Here are a few pics and videos about my progress.
*workstation for my drum machine (notice the laptop with Fritsl's how-to on the screen :) )
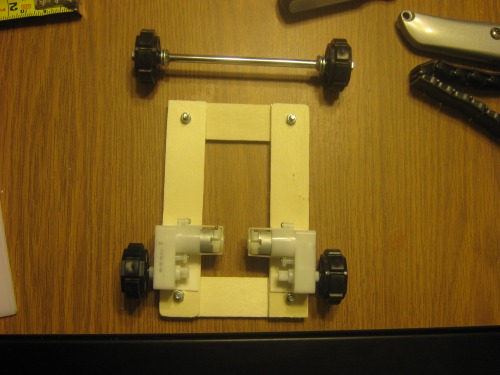
As you can see, the motors I recieved were shaped differently from Frits'. This forced me to adjust the frame to make a wider or fatter base for the drum machine. If needed I'll add another painter stick to the middle to give more support for the electronics that are going to be added.
*Update - Jan 25, 2009
Man, its been a while since I updated this page about the little progress I have made. Its mostly been a learning experience but now I feel more confident with the picaxe setup. Mostly I've been able to figure things out on my own. The only problem I have had so far has been with the wiring of the second L293D chip and the connection to the picaxe. Overall I've had a lot of success and can't wait to continue.
Navigate around via ultrasound finding objects to play on.
I used the hole in the middle to route wires through, and mounted the picaxe chip in my own built circuit on a board that was slightly wider than the hole. I then just drilled 4 small holes to mount the board.
If you want to make your bot permanent, I think the Picaxe project board is wide enough to mount even with hot glue.
Servo Actually it is mounted on a servo. Its probably not too easy to see in the photo but its there. The problem I’m having is getting the servo to work with the picaxe controller. For some reason the pulses aren’t triggering the servo. I probably have it connected wrong
If you have firmware A.4 then it will not work with a servo. They will replace it where you bought it if you do. I am waiting on my A.5 firmware 28x1 chip. You can check it under options then click firmware version.
Thats a cool servo also. Never seen one like it but I can see the one gear.
firmware Looks like I’ve got firmware A.3. I did a few google and LMR searches - seems like this is a good firmware to have. I’m thinking it must be my code or my wiring. Will have to do some more checking later.
FYI; You will not be able to FYI; You will not be able to use the code I send you using servos. The YDM’s use pager motors only, I presume you know. I do not understand how “people” think they can make YDM’s using servos, but hey, you may surprise me
pager motor Actually it is a pager motor - I’ve been calling it a servo but its a pager motor (I just got the parts you recommended). I should start using appropriate names sorry for the confusion
figured it out! After reading a bunch of comments on indiviuals robots I learned that you can’t use the digital outputs because of the darlington driver, something to do with the transitor lowering the voltage to the pager motor. https://www.robotshop.com/letsmakerobots/node/1050#comment-10743 I used the digital inputs instead. This took a while to figure out, but its so sweet when you do