

Hey don't laugh,at least this little buddy has managed to draw something !!!
Here are three videos,
the first one is the initial video,where the value of pwm (variable dspeed) was set small,so,it was very slow...You might notice that there's a battery holder just beside the marker pen..It is empty. Actually I've rechargable AA batteries. So 4X1.2 V= 4.8 Volts where normal AA batteries would give 4X 1.5V= 6.0 volts. So,initially I decided to use 6 1.2V batteries..but later discarded this paln.
The second one is another video,where I've incresed the value of pwm to get faster drawing...
And in the third video,the position of the bot is reset manually,so that the drawing gets more perfect..
And here are the two codes,for the first one and the last one of the videos..
initially the robot goes 15steps forwards and then 15 steps backward. This is to calculate the correct pwm for both motors individually.
feeling very tired as I had to stay awake whole night...I shall upload other details later. Kindly check the code,though it is not well commented,and i couldn't find enough energy to clean it out,but it still works..
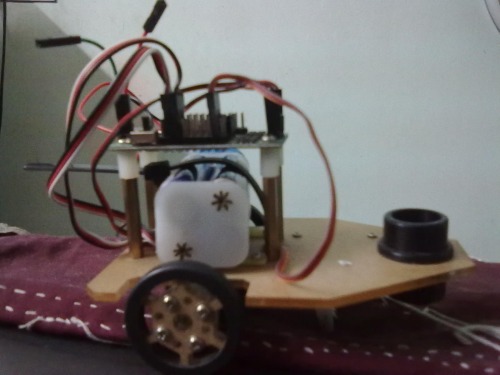
Here are some images of the bot and the homework it has done

I never thought that drawing a straight line would he so hard,initially had big plans of drawing pictures of robi and asimo. As time passed,I realized that it's not gonna work that simply. However,I am not satisfied with the result,and I might have even crossed the time limit,still am happy that I could at least draw something.
######One more thing to mention,the original code for doodle bot had pin 7 assigned to battery monitoring. I think it should be A7 instead of 7. However I might be wrong,maybe the code has A7 and I have deleted the A. Whatever.........##### OK OK,MY MISTAKE..
Thanks to my partner Taniya,who said that instead of giving her more time,I should complete the project as soon as possible. Heheehe. So I stayed awake whole night to complete it. love you dear.
- Actuators / output devices: one micro servo, Two Continuous rotation micro servos
- Control method: autonomous
- CPU: atMega8
- Power source: 4 X 1.5 V
- Programming language: Arduino C
- Sensors / input devices: Two hall effect sensors
- Target environment: smooth surfaces
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/doodle-draw-break-dancer