I require your help regarding a problem I’m encountering.
I’m fighting with electronics and software but I’ve come across mechanics.
I have mounted a provisional “head” on a standard pan and tilt:
The final idea is to get something like this:
At the moment the prototype is more or less like this (very ugly yes, I know …):
But I found that the axles bear a lot of weight and I am afraid that if I leave it like that, the servos will not last long. Also the movement, especially on the Y axis is not very “fine”
Therefore I understand that I must design some type of gears for the X axis and for the Y axis.
for the X axis and since I do not have a 3D printer or the knowledge of CAD, I have found a solution that can help me: A modified axle wheel:
but for the Y axis I can not think of how to fix it provisionally. I am reviewing how similar robots have solved it but I can not find an easy and homemade solution at least for the testing phase.
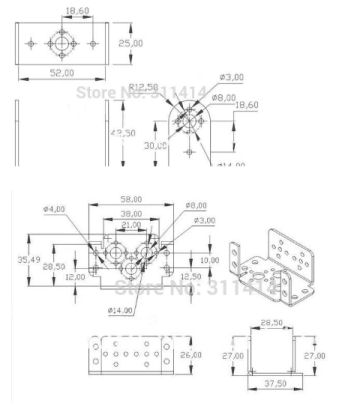
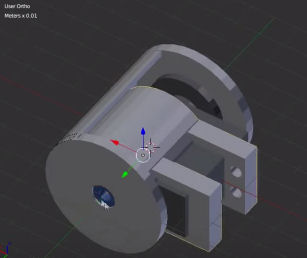
You need the tilt axis of rotation to be centered in the sphere that makes up the head. The sphere itself needs a fairly large hole at the base to pass the mechanics and electronics. Can’t quite tell the size of the robot, but something like this would seem to work well:
It’s very rigid, able to support a decent load, and you could pass wires too without worry.
The “camera plate” would be adapted to support the head and additional electronics. Consider designing a single 3D printed shape which mounts to the plate and has mounting locations and holes for all electronics, LCD, sensors etc. It might not be home-made, but it will save a lot of time and iterations - best to spend once rather than buying and testing and buying again?
Regarding aesthetics, it seems like your prototype has a mouth, which greatly reduces the size of the eyes. It’s also considerably lower in the head than in your CAD design, giving it a different look. A commercial robot of that size would use injection-molded plastic, but for something one-off, you might consider 3D printed plastic. An alternative would be to find a sphere which you could use to create a female mold, then use fiberglass to create the head.
An idea would be to ensure the head “cover” does not touch the shoulders directly - leave a bit of a gap which can be filled with something which allows it to be smooth running (and no noise), like cloth etc. Regarding the black “face”, this can be done many ways, but for the most professional look, you might consider machined or laser cut dark acrylic.