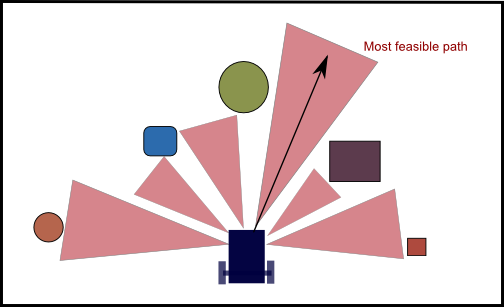
Im thinking of implementing something like whats shown below. The bot scans from left to right, in increments of say 20 degrees, storing each value recorded. Then based on these readings, moves in the direction where there is no obstacle. Now here lies my problem. I cant figure out how to get near precise control of the bots turning movements. I can, say make it turn 90 degree left or right; but how do i make it turn to an arbitrary angle from a halted position? Is this possible, or am i being over enthusiastic? Please note that i use motors as acutators and not servos. Thanks very much.
Yeah it’s totally possible.
Yeah it’s totally possible. Look into something called encoders, I’m pretty sure they do exactly what you’re asking. They’re little discs that are painted. They can look like this:
or this
or this
or something like that.
These encoders are attached to wheels and rotate as they do, little optical sensors read the patter and can figure out the distance, in degress (or radians) that the wheels has rotated.
Read this article, it seems pretty helpful. http://www.societyofrobots.com/sensors_encoder.shtml
darn! now, why dint i think
darn! now, why dint i think of encoders!! Thanks a mill 
yep
No prob bob  I’m excited to see you implement your idea!
I’m excited to see you implement your idea!
Since i got this working, i
Since i got this working, i have been thinking about adding another pair of USB mice to act as both wheel encoders, as well as bump switches for collision detection. currently looking at a control loop to juggle 3rd-leg optical mouse input vs left/right motor speeds







 I’m excited to see you implement your idea!
I’m excited to see you implement your idea!