

Ok i’m back, after making few swaps in the leg order i found out the leaving things as they are, although they’re confusing, will keep things working. I went back to changing values and i got quite tired from changing them back and forth so i thought about the following:
Since i designed my robot to have a circular symmetry ( the coxas are all on the same circle ) i thought why not use two sine functions of 24 steps with :
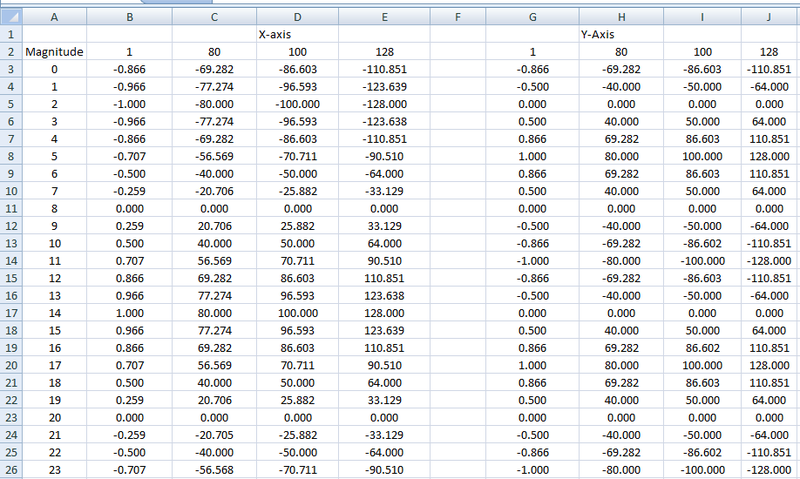
For X-axis
Min value : Step 2
Max Value : Step 14
A Period of 24 steps
For Y-axis
Min Value : Step 11,23
Max Value : Step 5,17
A Period of 12 steps
I’m working on making such functions at the moment. One question though, can the position shift be a floating value or it has to be an integer ?
Edit: GOT IT  !, I’ll be using this formula http://s2.postimage.org/ceaf58jyx/Shift_Formula.png
!, I’ll be using this formula http://s2.postimage.org/ceaf58jyx/Shift_Formula.png
Where:
X : is step number
Mid: is the mid point where the shift is 0
T : is the period

 . i really have no idea whats wrong with them.
. i really have no idea whats wrong with them.
{kind=link}