

So I was at the Disney store in the local mall, and I saw this R/C Wall-E toy, which actually looked big enough to stuff some electronics into, so I just had to do it :-)
I call him Borg-E because the way the maxbotix ultrasound sticks through the plastic "lens" reminded me of a borg from star trek.
The microcontroller is the Arduino Diecimila I used to have in drumbot, with an Adafruit motor/servo driver shield stuck on top. He is powered by an internal 6xAA battery pack, and can drive around, avoid objects using either IR or ultrasound, turn his head left/right and even play simple sounds. You can see him doing most of these things in the video, except he is not using the Ultrasound there, he is navigating with IR only.
Photos!!!!
here you can see a close-up of his head, with the Ultrasound sensor protruding from the plastic lens of his right eye.At the base of his neck you can see the tiny PC speaker I used for sound. It is just glued inside the space beneath the neck.
Inside the head is a micro servo and a paper clip that allow it to turn back and forth....

A view from the back :

Detail of the bottom, showing the IR sensor mounting. The brackets are just cut and bent aluminum sheet that I cut with tin snips. Out of the bottom of the frame would be the power switch, which is mounted underneath on the back left corner.
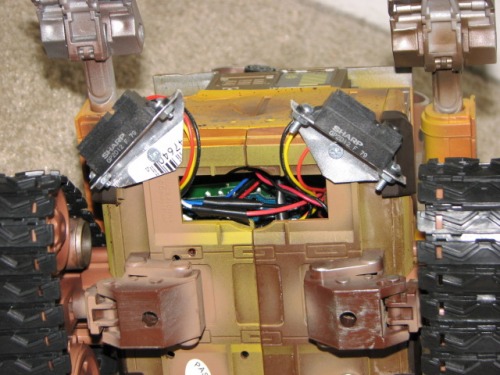
Best of all, the back plate opened up like this on the toy, because that was where the batteries were. This made it pretty easy to just snip out all the extra plastic bits inside and made room for the arduino and larger battery pack. Everything is just stuffed in there, it is not secured in any way.

Here I have pulled out the battery and arduino+motor shield to give you all a better look at how it's hooked up...
The adafruit motor/servo shield I used has these convenient holes connected to the analog pins, power and ground that I just soldered pins into, then used female jumpers to connect all my sensors. Unfortunately the pins are a little more than 0.1" spaced, so i could not just use servo cables....
The PC speaker is the lone Red wire going across the middle, it just goes right into a regular arduino output and I used some found code to generate tones with it.

Update 8/18/2009
Made some substantial improvements to Borg-E's code last night, he will now randomly choose from a few different "behaviors", including a combined Ultrasonic and IR navigation routine that causes him to seek open spaces, a IR avoidance and wandering routine, and a kind of fidgety standing still and singing to himself. Up to 10 of 14k on my arduino, will prolly just keep writing more behaviors to add personality till I fill it up ;-) Will try to get a new video posted tonight.
Navigate with IR and ultrasound and play sounds, looks adorable
- Actuators / output devices: Hitec hs-55 servo in head, toy motors for driving
- Control method: autonomous
- CPU: Arduino Diecimilla
- Power source: 6xAA
- Sensors / input devices: Sharp IR, Maxbotix Ultrasound
- Target environment: indoors mainly
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/borg-e

