

After a long period of inactivity, I've finally returned to working on this project. I was just too busy to work on it and I didn't have the parts I needed. However, ordered a custom PCB and assembled that, and the brain is ready to go. I've just got to assemble the chassis and program the brain.
Update 11/19/2009:
Installed a charging plug for the charger, time to see if this battery will hold a charge. The battery is a 6V sealed lead-acid battery from an 80's Sears Die Hard flashlight. If it works, it should have plenty of power for the bot. The only issue is that the battery weighs a ton, and that adds some concern with the light chassis of the bot. Since most of the bot is comprised of stirsticks, if it were unable to stop and it slammed into a wall or something there could be some pretty big damage. However, the sensors I'm using should be able to keep the bot from crashing into anything.
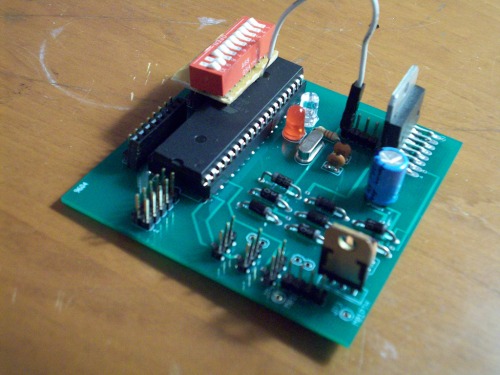
I haven't hooked this up completely yet, but this is the mainboard of the bot:
Wander around the room
- Actuators / output devices: servo, 2 standard motors
- CPU: Atmel ATMega32
- Operating system: Custom programmed
- Power source: 6V Lead-acid battery
- Programming language: C
- Sensors / input devices: Sharp IR, rear bumper switch
- Target environment: indoor, flat surfaces
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/blahbot