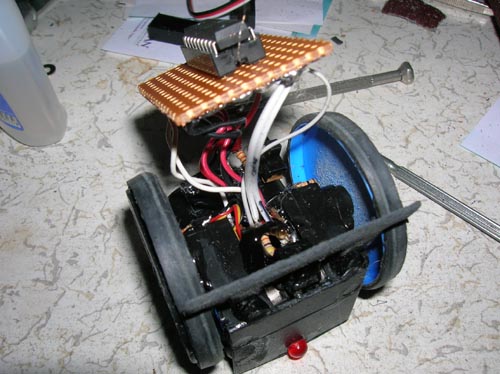
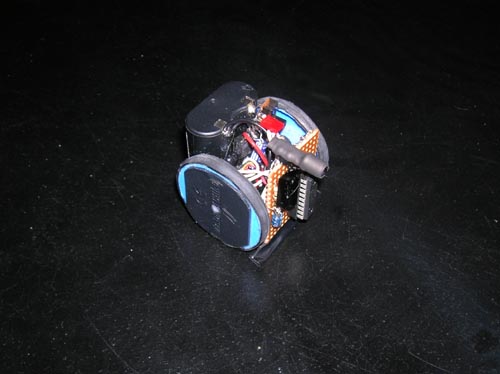
The name of this tiny robot is Atom. Atom is a micro sumo robot. Its dimensions are 5 cm x 5cm x 5 cm
It has a CNY70 sensor to detect the white path and an IR sensor to detect the objects or opponents.
It weights only 73 grams.
You can watch its video from this link
http://www.facebook.com/video/video.php?v=256718551023679
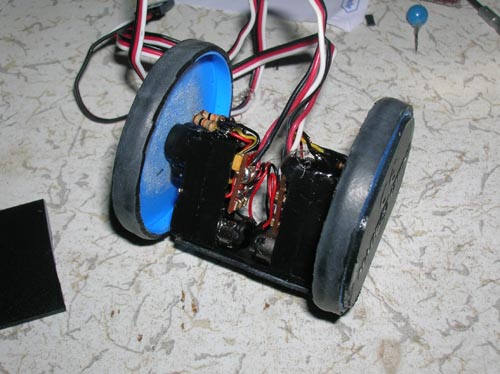
- Actuators / output devices: 2 servos
- Control method: autonomous
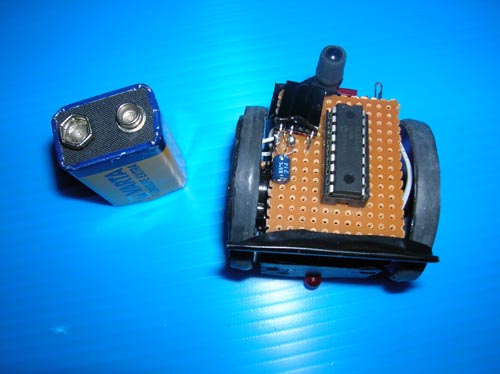
- CPU: pic16f628a
- Power source: 6 V alkaline battery
- Programming language: C
- Sensors / input devices: cny70 tsop1738 IR
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/atom-micro-sumo
I have thought about mini/micro/nano sumos
but, never thoght of using servos for drive motors.
servos
DC motors require motor driver circuits so the board of the robot should be made larger. This is not good for micro and nano sumos. Besides servos are very practical for controlling and dont occupy space
Nice bot! How much can it
Nice bot! How much can it push?
weights
It weights 73 grams and now can push 180-190 grams. The weight limit for micro sumos is 100 gr. I will increase Atom’s weight to 100 grams, then I think it may push about 200-210 grams. I wish I could find micro servos having more torque, but it is not so easy here.
That is normal
Gordon MComb highly recomends its actualy.
Some Quick Questions
Just some quick questions
- Is that a raw PIC or is it a PICAXE?
- Is that a 6v camera battery?
- Where did you get those servos?
It says PIC16F628A in the
It says PIC16F628A in the description, it’s a standard 8 bit PIC microcontroller.
Yes
Yes, it is a PIC16F628A, a 8 bit pic microcontroller, and also it is a 6V Toshiba camera battery. The servos are Artech AS050 servos, that I’ve found in a hobby shop in Türkiye.
continuous rotation servos
Parallax.com’s Sumo Bot and BOE Bot use continuous rotation Parallax servos. Basic Stamp platform.
continuous rotation servos
I use normal servos by hacking myself

