Hi guys, If you have worked with Sharp IR Distance Sensors you may have noticed that they are not symmetric at all. They give high values when an object is placed in the side of the emissor.
Take a closer look at this picture to see the asymmetry. The values were gotten by the ADC of an Arduino Board, so 0 means 0V and 1023 means 5V.
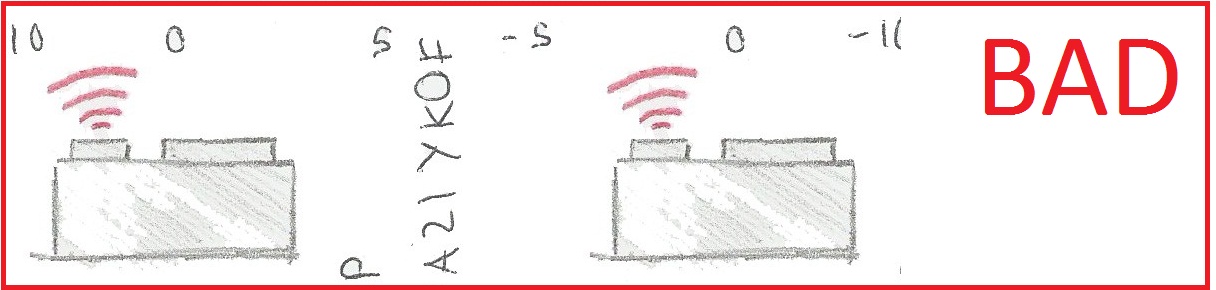
This asymmetry can be a problem for example if you have designed a sumobot with two Sharp IR Sensors in the front and you want your robot to be able to track your opponent.
If you have placed the sensors normally this is what your robot will see.
If a robot needs to scan for an object (i.e. have a Sharp IR sensor on a servo that rotates and takes a measurement at every degree) then a vertical mounting of the sensor is a must, or the measurements will be affected exactly by that asymmetry. We tend to use the sensor to give the impression of the robot having eyes, mostly because of the effect it has on women and children, but in that case we just use the sensor to determine if there is an object or an open path in the direction the sensor is “looking”. In a Sumo robot, just like you are showing, the interest is to detect the oponent in a large field of view, so placing the sensor horisontally makes more sense. Having the left and right sensors placed like in your last drawing makes sense, although not many people realize that, so thank you for pointing it out and explaining why it works that way!