

Before we start
What is the sumo robot?
It is a self-control robots with specific dimensions and features, it is also designed in a Hostile shape which qualify it to participate in the contests and competitions with other robots.
The name “sumo” came from an old Japanese sport, which is two opponents fighting in a ring, each of them trying to push the other opponent out of ring, And this is what should robots also do in the sumo robotics competitions, where two robots placed in the ring and each other trying to push out its opponent.
The idea:
Building a robot with a defined specifications and commensurate with the laws of that competition (Sumo), this robot must be in exact dimensions to fight and survive to not be cross out of ring any way.
So let’s have a look to The Sumo robot competition laws:
I will explain some important roles you should consider while building your own SUMO it also might help you Imagine and innovation your own Idea without going in deep details.
1. Dimensions: Width 20 cm, Length 20 cm, Height not specified.
2. Shape: the robot shape can be changeable after starting the race, but without the inseparable parts to maintain being one central Object.
3- Weight: does not exceed 3 kg.
4. Robot must be self-controlling
Step 1: Components
1 Arduino Ano3
2 Dc Motor
1 L298N Dual H Bridge for Arduino
1 Ultrasonic sensor
2 IR TCRT5000
1 Battery 9v
AA battery 4 * 1.5 v pieces + Battery house
4 Robot Wheels
Step 2: Uses for Each Component
Now we have the Required components , so let’s go in details to know what is used for ..
1- Arduino Ano3
It is a main board that control all the parts and link it together
2- DC Motor
Which help robot to maneuver and move within the ring of COMPETING
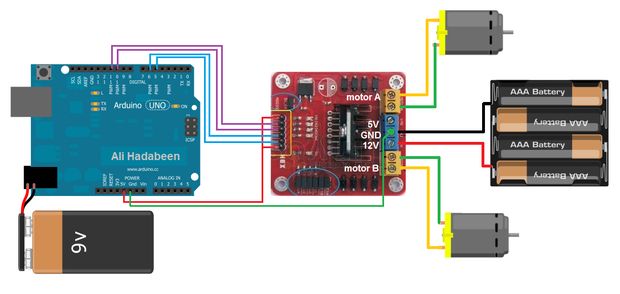
4- L298N Dual H Bridge for Arduino
It is a small panel that provides constant voltage to the motors, as well as the support of the Arduino plate with good control of movement and voltage.
5- Ultrasonic sensor
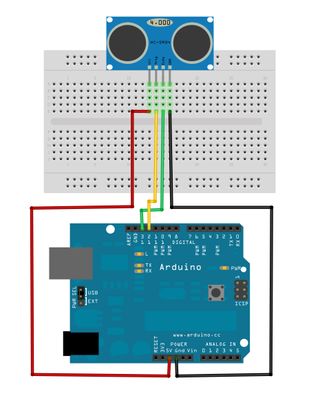
The ultrasonic sensor is used to locate the opponent's robot and is usually placed at the top of the robot.
6- IR TCRT5000
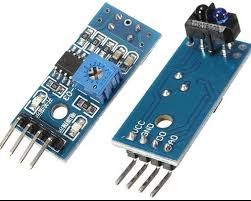
As we have already mentioned, the contest ring designed in a certain size and it have two colors, filling is black and frame is white. The contestant should not go out. Therefore, we use the IR sensor to make sure that the robot will not be out of the ring. This sensor has the ability to distinguish between the colors of the ring).
7- Battery 9v
It support the main board (Arduino) with the important voltage.
8- AA battery 4 * 1.5 v pieces + Battery house
It support the two motors (DC Motor) with the important voltage and it must be separated to give the full force for the wheels.
9- Jumper wires
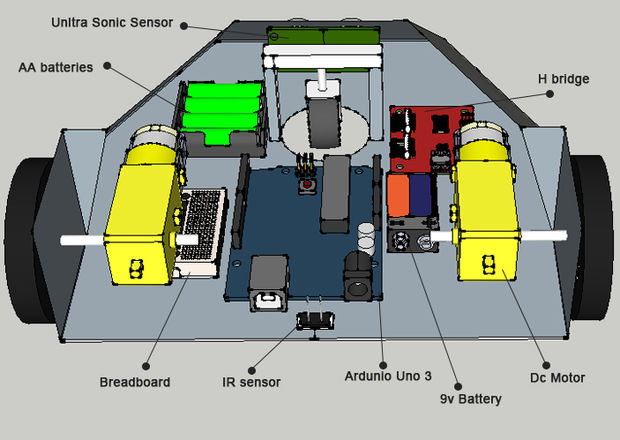
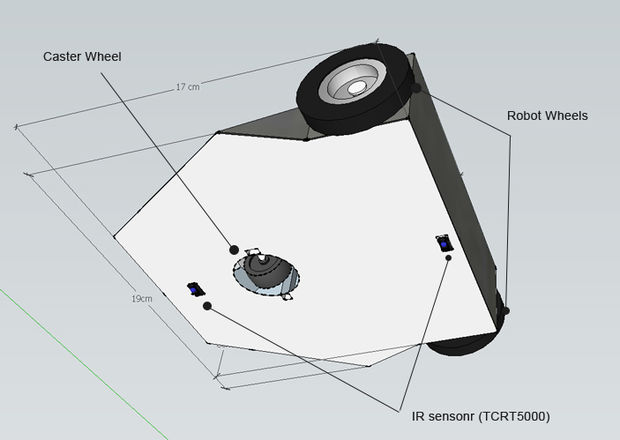
Step 3: Design
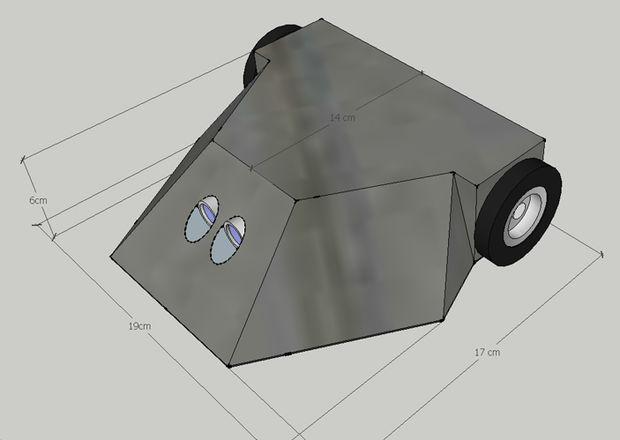
I’ve made two sumo robot designs using Google 3D sketch-up
and I take into consideration to be in specific measuring with competition laws, and you can the work of any other design, try to think of more creative designs.
In order to be more sensitive to the robot weight in submitted or then put the batteries in the front of the robot with the front shield at a 45-degree angle to the form of the robot.
Step 4: Play Strategy
As we mentioned before that the robot must have its own ability to control it self, so it gives us the ability to programmed it in more than one way, it depending on how you want the robot to play on the ring just as any opponent in real want to win the game.
Play strategy (1):
· We will make the robot around itself continuously.
· The robot is always measuring the distance continuously during the rotation.
· If the opponent distance measured is lower than (10cm for example), that means the opponent is in front of robot us directly.
· The robot must stop rotating and then starts the attack (move forward with full force quickly).
· The robot must take the readings from the IR sensors always to be sure that we didn’t cross the ring border.
· If Read of IR presence of white color, it must move the robot directly in the opposite direction of the sensor (for example: If the front sensor, which gave an indication of the white color of the robot moves backward)!
Play strategy (2):
· At the start robot measure the distance in front.
· Robot move back the same measured distance.
· Robot stop rotating and then starts attack suddenly (move forward with full force).
· In case of opponent attach robot must rotate 45 degrees while to survive itself if falling out of the ring.
· The robot must take the readings from the IR sensors always to be sure that we didn’t cross the ring border.
· If Read of IR presence of white color, it must move the robot directly in the opposite direction of the sensor (for example: If the front sensor, which gave an indication of the white color of the robot moves backward)!
sumo robot
- Actuators / output devices: Freeduino/Arduino > Boards
- Control method: self controlled
- Operating system: Arduino Diecimila
- Power source: 4 AA calls, 9v battery
- Programming language: C++
- Sensors / input devices: 6 PING Ultra Sonic sensors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/arduino-sumo-robot
