

Antaeus (also Antaios) (Ἀνταῖος) in Greek and Berber mythology was a half-giant, the son of Poseidon and Gaia.
He would challenge all passers-by to wrestling matches, kill them, and collect their skulls, so that he might one day build out of them a temple to his father Poseidon. He was indefatigably strong as long as he remained in contact with the ground (his mother earth), but once lifted into the air he became as weak as other men.
--------
This was my first ever project back in 2005ish when I was 19yrs old. Unfortunately, Antaeus was never fully completed due to life circumstances and ended up collecting dust in a storage unit for many, many years until recently, when I pulled him out of Hades and brought him forth into the light of day.
Originally designed to be a treaded bot, Antaeus sports a wireless nightvision webcam mounted on a servo, with a front-facing ultrasound sensor and IR rangefinding built-in to the Co-processor board. I used the Tamiya track set to construct his locomotion attached to two continuous rotation servos from Parallax.
His frame is constructed of sturdy 6mm Expanded PVC. He's quite the fatty--er---"heavy" lightweight. Antaeus weighs in I believe under 2lbs, fully loaded.
My original plan was to add on a GPS module (with an antennae wired above in the pole), along with an accelerometer and magnetic compass (Parallax version). As of the date of construction he features a BASIC Stamp 2e microcontroller mounted in a Lynxmotion Mini Bot Board II, connected to the Libby Board co-processor--an original creation by Harry W. Lewis of Blue Bell Designs (http://www.bluebelldesign.com). At the time (and still, in my opinion) a really nifty board made for BASIC Stamps and similar.
The Libby Board also features built-in IR rangefinding.
I was going to attach some (HUGE) RF serial modules that I found at a local electronics store to wirelessly control/program Antaeus, but along with the rest of the project i never got around to it. He will now be consumed by the Robot Gods and used for parts in other future projects to come.
Herein lies the final effigies of Antaeus, once formidable and mighty. May he rest in peace, amen.

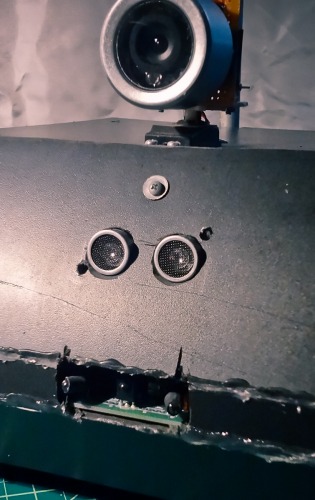
Close-up of sensors. Note my at-the-time amazing gluegun skills *sarcasm*.
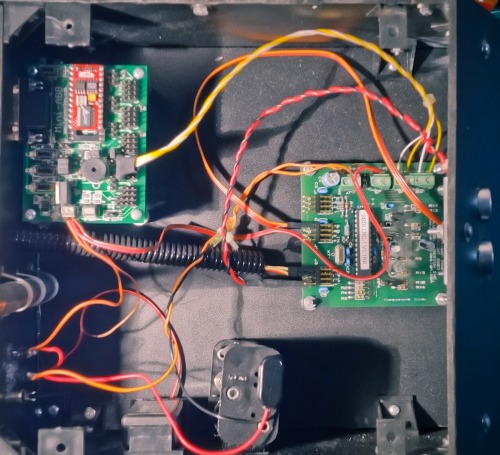
Antaeus' internal organs, disemboweled for the world to see.
The Libby Board (front), Bot Board II (back).

Braiiiiiiinnnnnnnnsssssssssss. Basic Stamp 2e. I was going to switch it out for a BX-24 that I had purchased back in the day...

The rear view. Serial(LOL!) (left), Servo wire channel (middle), GPS module pole attachment (middle-right), Power on toggle switches & reset button (right).
Yes, that is dirt/dust. He was a dirty, dirty robot :(.
Three cheers for Antaeus!
Collects dust
- Actuators / output devices: 2 continuous rotation servos ( http://letsmakerobots.com/node/3275 )
- Control method: Wireless RF modules, Tethered
- CPU: Libby Board co-processor, BASIC Stamp 2e on Mini Bot Board II
- Sensors / input devices: ultrasound, Wireless Camera, infrared
- Target environment: indoors, Mortal World, Mt. Olympus
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/antaeus-rip
