Very nice robot! It almost needs arms (perhaps two servos each?) If you’ve found that the load added is causing a strain on the motors, consider changing them to the following 6V. The 3.7V LiPo was used because the DC brushed motors included with the Tamiya Twin motor gearbox operate at 3-4.5V nominal.
This would allow you to use a 7.4V LiPo battery. Note however that you will NOT be able to charge the battery via the onboard LiPo charger, so please charge anything other than a 3.7V LiPo outside of the robot.
Actually, A1B1 served as my introduction to robotics. My next one will be a more Wall-E like robot and bigger to boot. I also have the parts for the robot after that, which will be my Holy Grail, a walking biped. Of course, it is a long term goal, as I want it to have a dynamic gait with small feet, not the always stable gait that most biped uses. I’m a software dev that have strong interests in robotics from almost my childhood. Challenge, here I come!
Three servos per arm and you almost have a Wall-E! Perhaps create a predecessor to Wall-E (i.e. it doesn’t need to be a copy but rather looks like it came from the same manufacturer as Wall-E). Use some cardboard to make a body perhaps? Wood might be a bit heavy.
I have the same motors installed for my Rasberry PI Rover project (https://www.robotshop.com/letsmakerobots/node/45294) and I used a 7.4V battery. However, my “default” speed using the motor controller is 50%. I rarelly exceed that but it’s working perfectly up to 80% PWM. After that, the idle load is a bit too high for my motor controller and the power seems limited & movement are odd. I suppose there is a bigger strain on the motor but it works fine for me, and it’s way faster :o)
Does the robot move anonymously or do you need a controller? I know you used the Ardiuno programming but code did you use? Sorry for my questions I’m new at this and I want to build a robot.
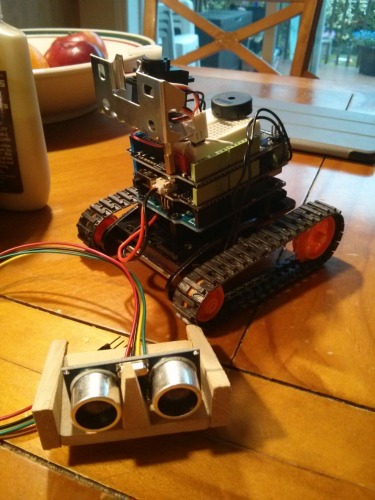
Yep, it is moving autonomously. It starts looking ahead and if the way is clear, he starts rolling. If it encounter an obstacle, he looks left and right (by turning his head) and if one side is clear, he turns and goes that way. And the cycle continue.
Of course, here, autonomous is NOT a synonym of intelligence…
Thank you for responding so fast and thank you for the advice. I wanted to know if can reproduce this project and if you can help me on building a robot like this?
As I’m pretty new myself in robotics, I can only give newbie advice… The only real piece of advice I can give, is to ask your questions around in the robotics forum if your previous googling has not yield any satisfactory answers.