I don’t want to be a spoilsports, the project looks very interesting, but did you really need to use 6 hitec servos (cheap ones, but still) to get potentiometers ?
This seems to be incredibly wasteful, considering that big potentiometers with enough drag to stay in place by themselves cost less than 50c a piece…
Anyway, I see that you are going for an interesting non-IK route, I’m looking forward to see it move with it’s puppet mounted on it
However consider: Same mechanical connections, duplicate master/slave hardware. Better pot (perhaps) then in a really cheap R/C servo). Range and scale of pot would be the same as in the slave servo. (oh yeah, they’re both linear pots, so they HAVE to be equal).
Simple interface to the required BB II. Which answers the previous question, we typically don’t need the isolation with the master and slave in proximity, we’re using TTL levels into (OK analog 0-5 V) and out of the BB II. Six axis, not enough inputs just on an SSC-32, and you’d need a uP (BB II) anyway.
Never used motor-generators to transmit position, maybe you mean Selsyns or Synchros?
Xevel:, yes you are totally right and it just seem a bit of a waste. its a shame to mod the servos but i do keep the boards so if i need them at a later date i can “fix them.”
and trust me, if my programming skill’s weren’t as bad as they are, then right now we would have a fully operational Stewart Platform working with Full Inverse Kinematics.
Ted:
Love your sense of thought.
When i first joined, i knew nothing of robotics, except that i wanted to make one. Robots are cool!
There is still lots for all of us to learn, and the good thing is, is that we can do it at our own pace.
I certainly need to learn more. From what you see here on these pages, and other posts iv made 'i have only learned these things through everyone else, and i have them to thank.
It empowers me to think i can inspire others or even teach others, but its great to see projects grow from nothing.
Create, Innovate, … Inspire!
Alan:
i did think about putting one on the top but id have no use for it. after all, iv already been greedy with a 6AxisJ/Stick anyway.
Well, I might be able to help with the mathematical side of the IK computations, and make code to demonstrate it if you are interested.
With the rotating actuators, it’s a little bit more complicated than a standard Stewart platform, but I scribbled some stuff on a piece of paper and I think I have found how to do it
Only thing I can’t do is write it in Basic, but I can write it in a way that makes transcription to Basic code straightforward.
cool, well that very kind to offer your help. i think i stick to the telemetry for this project, but i would be very interested in getting the “platform” work with IK for future projects.
would be a very interesting piece of code to look at.
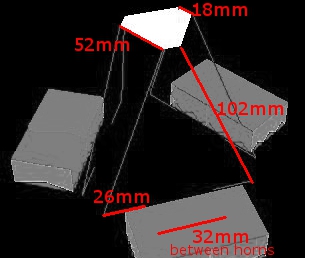
not really. precision is not key. you will notice that the two top platforms are different sizes. to get them working a little better i could make them the same, but its not important.
i could also get the servos in the slave to have more movement in it than in putted from the master. like 2:1. small movement on the master will result in larger movements in the slave. ??
Thats awesome!
You always come up with some cool stuff!
I wonder if FK is hard to do for a Stewart platform?
Is it hard to operate the 6DOF joystick? I mean, it looks like the joystick should be fixed to the table. Does shorting the motors give to much friction, maybe a resistor to lower the friction?
apparently the FK is quite a challenge. IK can be solved quite quickly by this is all iv been told.
There you go… there’s a challenge for ya.
There is not too much friction and its quite easy to use. i haven’t soldered the motor wires together otherwise i think there would be too much friction.
your right i do need to attach it to a more stable surface.
On a regular Stewart Platform, IK is straightforward (it’s a matter of vector arithmetics) and you can do each leg independently, while FK requires to solve a set of 6 (linear) equations with 6 parameters all at once. My vote would be on the “IK is easier” side.
On this setup, the actuators rotates instead of translating and there is an additional link in each leg. It unleashes a flurry of trigonometric functions, both for IK and FK… Solving a set of 6 non-linear equations to compute FK seems harder to me than computing IK, where you “just” need Al-Kashi and quadratic equation resolution.