This is a simple robot that I made for my cousin, it only uses 2 LDRs, 2 geared motors, and a 555 timer IC.
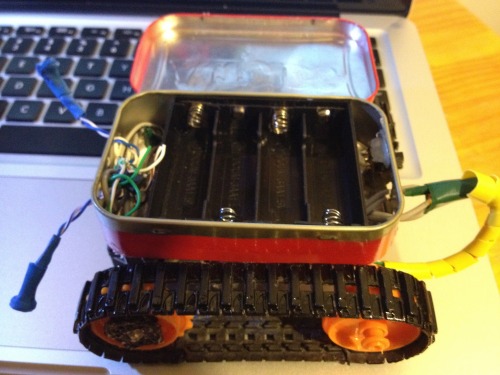
I reused a Tamiya Tank tread kit and gearbox for locomotion. All powered by 4 AA batteries. The batteries, IC, and switch are all housed in an Altoids tin.
Not much more to say about this robot (Sorry OddBot)
Requested pictures:
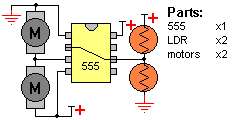
Schematic I found from the internet.
There's not much to see on the inside because i DeadBugged the 555 Timer.
EDIT: As of July 25, 2012 this robot no longer belongs to me. It has been shipped off to Chicago to give company to my cousin.
Searches for light
Actuators / output devices: Tamiya twin gearbox with treads
I think, if I got the schematic right in my head, you’re using two 555 timers in astable mode to generate the motor PWM and the LDRs vary the RC time constant to change the pulsewidth of the motor PWM.
I’m using a much simpler method. One 555 timer, two dc motors, not servos. a voltage divider output from the ldrs is fed into the 555 timer. I’ll post a schematic soon.
That 4 rechageble AAs won’t work well if their voltage is too low. The motors seem to run fine, but the light seeking behaviour is impaired. I wouldn’t recommend 3 AAs
Remember to use high geared motors because this robot takes shallow turns, so a slow moving robot will perform better, that was the only real problem I had. I would also use a potentiometer in parallel of the LDRs to trim the sensors if needed.





{kind=link}