

I started this project quite a while ago. My first inspiration came from a hobby parts site: http://www.hobbycity.com. They advertised a new brushless motor (hexTronic 2 gram) that was very light and a matched ESC that was 1 gram (tgy dp 3a 1s). Another inspiration was the low voltage small Arduino from SparkFun (Arduino Pro Mini 168).
I chose three rotors, but I think four might have been optimal since you can balance torque with half the props going one direction and the other going the opposite direction. Counter acting torque is yet to be worked out.
For control, I see a lot of math in my future. I've read a few articles on Kalman filters and I understand the concept, but so far I've not seen any good descriptions on creating/generating the parameters of the filter.
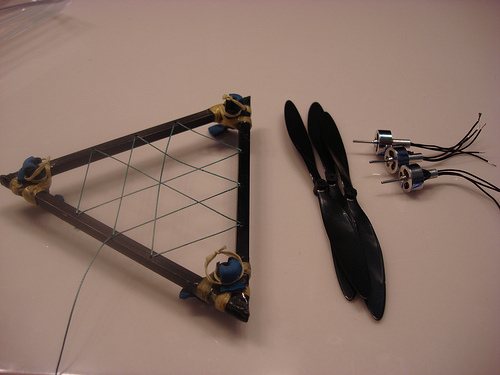
I'm about ready to start code development. The chassis is carbon fiber, Kevlar, Dyneema and epoxy. The motor holders also include pieces of rubber band. I'm using the rubber bands for a compression fitting, pull on the rubber band, put the motor in, and release. This holds the motors very well.
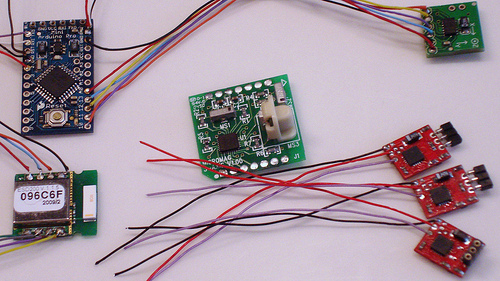
I've got the electronic parts I need. (The battery is not showing in this picture) Upper left is my Arduino mini pro 328, below that is a Bluetooth module from Sena (the smallest I could find). In the middle is a three axis magnetometer (for this, I still need to determine if it can supply valuable information). Upper right is a 3 axis accelerometer (only 8 bits resolution, I may need more...). Lower right is three brushless motor controllers.
Version 0017 of the Arduino environment has a new standard servo library. I will be using this because the motor controllers use an RC signal for control input. The accelerometer communicates via SPI, the Bluetooth module communicates via serial, and the magnetometer has a few options for communications.
I purchased another Arduino board in case I need some more computing power. I also thought of MicroMega's floating point processor if the math gets too hairy.
Next, I will be figuring out the best I/O wiring solution, and then I will setup one motor for some experimentation.
Flies autonomously with directional control
- Actuators / output devices: 3 2gram brushless motors
- Control method: Semi-Controlled
- CPU: 5 - 2 arduinos, 3 brushless controllers
- Operating system: Arduino and others
- Power source: 1 LiPoly cell
- Programming language: Arduino C++
- Sensors / input devices: SRF10 Ultra Sound, accelerometers, gyros, magnetometers
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/3-helix-wings


 so it probably evens out, how do you plan to control yours? theres not counter balance.
so it probably evens out, how do you plan to control yours? theres not counter balance.