

Rubik's cube solving robot

This blog is dedicated to build a Rubik's cube solving robot. I'll not give you any guarantee to even update this blog or finish it. I just want to share and discuss some ideas.
The first thing I did was to buy 3 Rubik's cubes at taobao.com (a kind of Chinese Ebay), each around 10 RMB. I bought 3 pieces, because I wanted to avoid one or two samples are getting damaged during my experiments and evaluations and I needed then to find exactly the same kind of probes for my experiments again, which can be quite annoying.
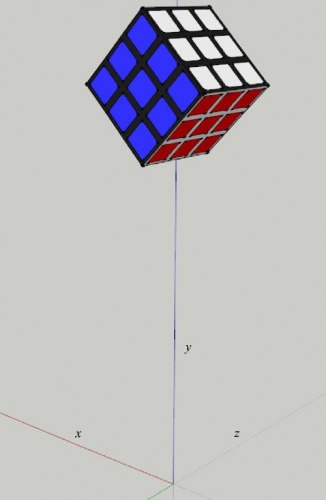
The cubes I bought have a side length of 57 mm with standard surface colors: white, red, yellow, orange, green and blue. Firstly I modulated the cube in sketchup in a 3-axis Cartesian coordinate system as shown below:
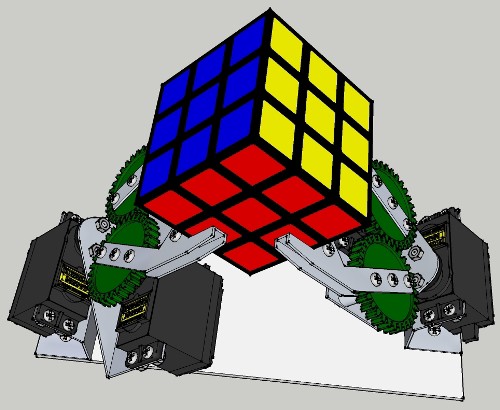
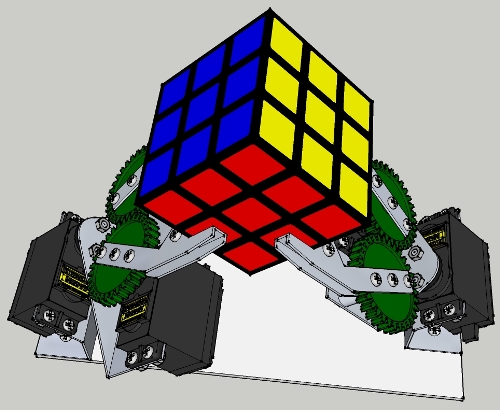
I'll go for two 2-DOF-grippers to do all solving movements, similar to this one. Seems to be much more, but it can be all simplified to a two 2-DOF-gripper configuration. Next step is to calculate/evaluate the minimum opening range of the grippers.
The opening range of the gripper is simply the diagonal of the square. Pythagorean theorem:
![]()


With the sketchup measurement tool we find this result too:

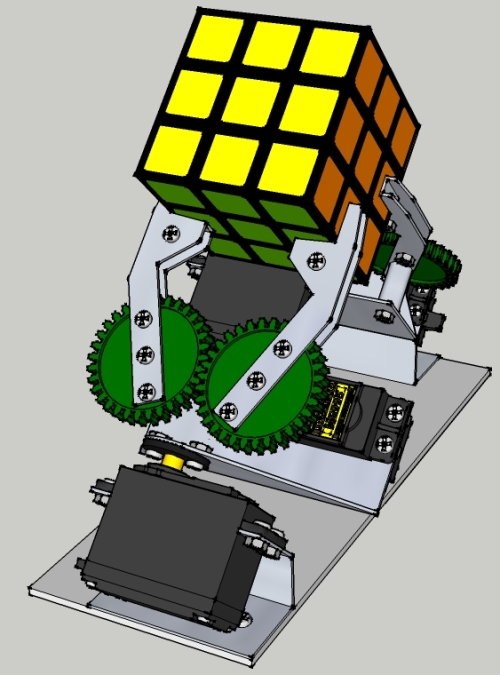
Now we can start to design the gripper.
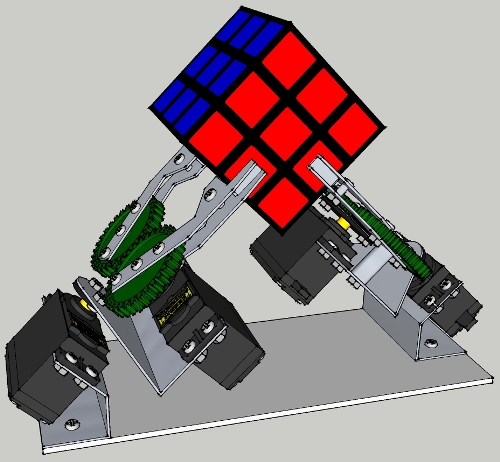
Gripper under design. 1 mm aluminum sheet, two 40 mm VEX gears, Tower Pro MG 995 servo:

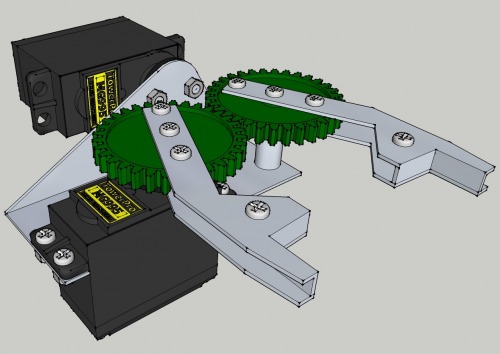

Finished gripper design:
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!