

Pictures and Video of Jon Hyland’s NanoSeeker Micro AUV

Â


Â
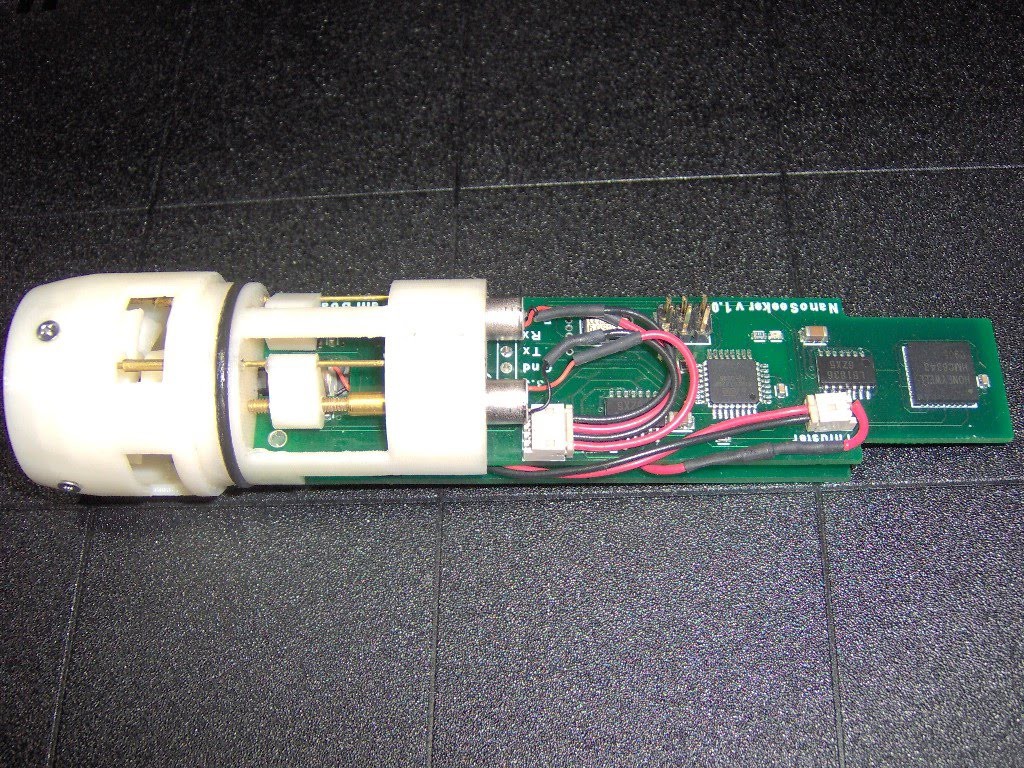
A couple of weeks ago we reported on Jon Hyland's NanoSeeker Micro AUV project. Today Jon posted some more details on his project and he seems to be making rapid progress. With the help of a rapid prototype machine there are now working prototypes of the vehicles in the water. The NanoSeeker has a "3-axis, solid state compass, with an integrated 3-axis accelerometer", a bluetooth debugging interface, and runs on a ATmega328 microcontroller. The vehicle is steered via two control surfaces controlled by a Solarbotics GM15 pager gearmotor. Oh, and don't forget that the vehicle is 6 inches long and 1.25 inches in diameter!
http://www.youtube.com/watch?v=IGX4m9Avs6w
Video of the prototype after the jump.
http://www.youtube.com/watch?v=Q9qbflEoz1EÂ
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!