

ROSshow: Visualize ROS topics inside the terminal

Have you ever SSH'ed into a robot to debug whether sensors are outputting what they should? Do you find it cumbersome to launch rviz, port forwards, or fumble for HDMI cables every time you want to just see what the robot's camera or LIDAR is seeing? Do you have piles of unlabeled rosbags that you just want to open up and see what's on the images in them?
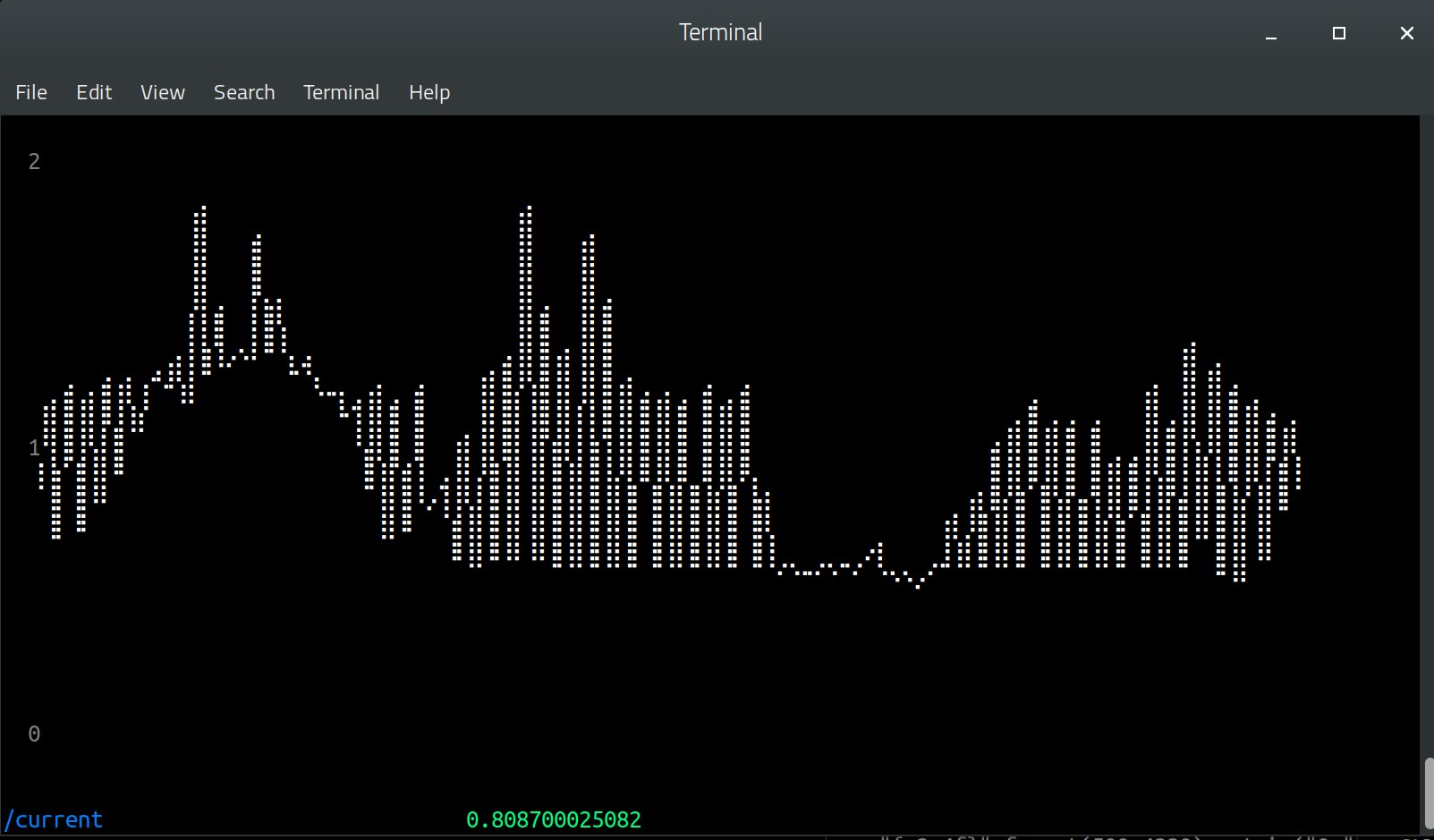
ROSshow is an open-source tool that use Braille characters to visualize ROS topics in the terminal. Besides time-series plots of most standard message types, you also get graphic visualizations of LaserScan, Image, CompressedImage, NavSatFix, PointCloud2, and more.
Get it at:
https://github.com/dheera/rosshow

 -
-



Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!