

Gears in Sketchup

In robotics, you usually want more torque or speed out of your motors. You can achieve this by using gears.
But how can you get them?
You could carve them out from wood or plastics, or use a 3D printer.
On my current robot, I would need 4 equally big gears. So I'll show you how to design them.
Tools needed:
- printer
Materials:
- paper
Software:
- Google Sketchup (http://tiny.cc/gjgpi)
- Involute Gears (http://tiny.cc/l73ph)
Download and copy it to your sketchup plugin directory.
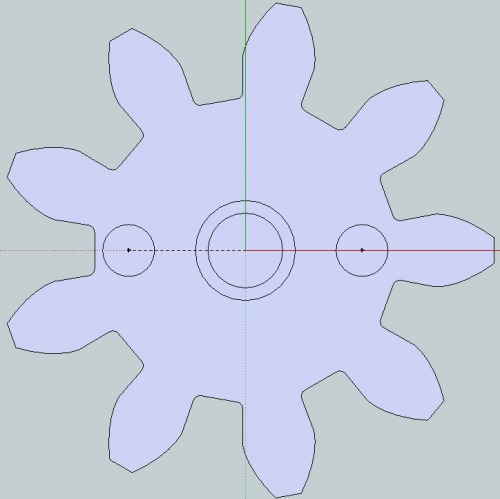
Step 1:
Drawing the gear.
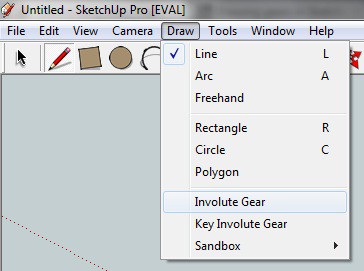
Once, you have copied the plugin and restarted Skechup (Template == product design and woodworking - millimeters
(Sorry Americans)),go to the Draw window, and select Involute Gear.


You probably get, how do set the gear. If you want to be more specific, chose Key Involute Gear.
I'll get some pressure angels here, so you'll know, how they look.
14,5° 20°: 25°: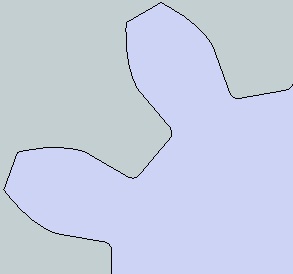
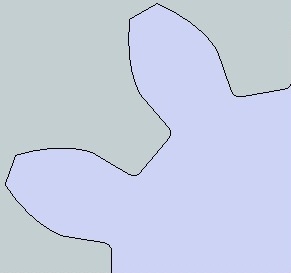
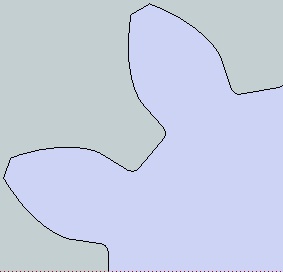
And here are all three, if they seem look a-like: My gear (the gear doesn't need to be 3D):
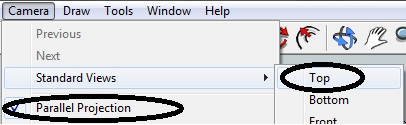
Step 2:
Printing the gear:
(Use Parallel Projection (not perspective) and the top view)
Printing preferences:
(Fit to page and Use model extents are unchecked! Set the scale 1:1)

Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!