

Collaborative Robots – Chapter 2: How to Identify Potential Processes For Automation


Collaborative Robots – Chapter 1: What Can Collaborative Robots Do?
Collaborative Robots – Chapter 2: How to Identify Potential Processes For Automation
At this point, we need to discuss the strengths and limitations of process automation with collaborative robots.
In fact, you probably already have a bunch of ideas as to what processes you would like to have automated. I am afraid to say that most of the tasks you thought were good candidates for automation are probably not the best choices to begin with. We need to be realistic about what the technology can do today. Some applications are easier to automate than others and as a first integration you should start small and simple.
Ideal tasks for a first collaborative robot are tasks that are highly predictable and repeatable. These are easiest to automate with a collaborative robot.
 Collaborative Robots
Tasks that are highly repetitive, predictable and structured are the easiest to automate with a collaborative robot.
Here's an overview to get you thinking:
Easy to automate
Collaborative Robots
Tasks that are highly repetitive, predictable and structured are the easiest to automate with a collaborative robot.
Here's an overview to get you thinking:
Easy to automate
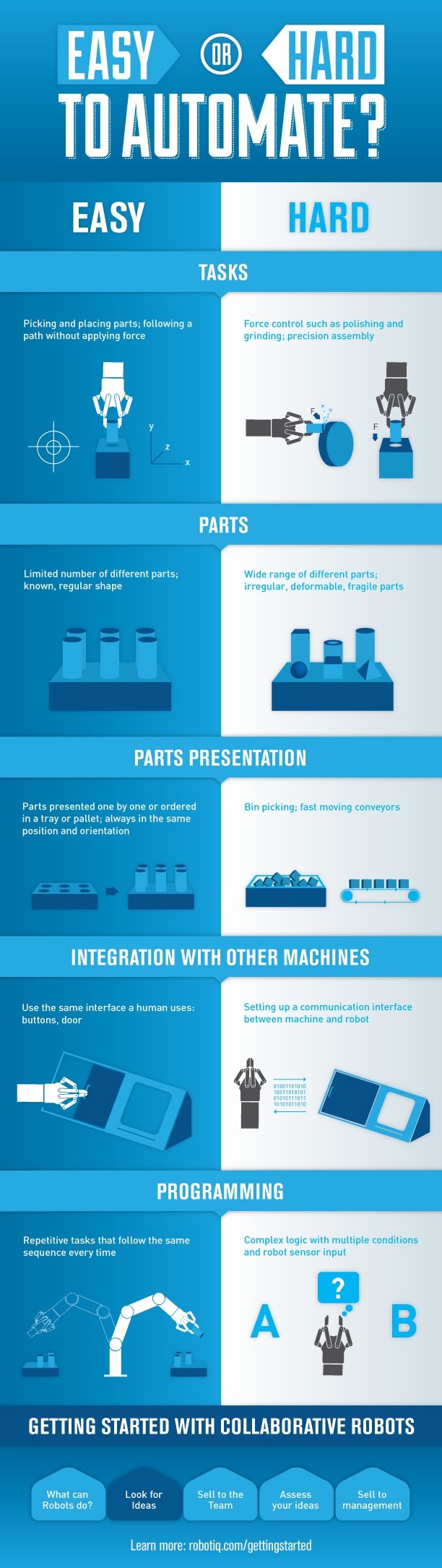 Easy or Hard to Automate
Resources:
blog.robotiq.com/what-is-easy-and-what-is-hard-to-automate
Easy or Hard to Automate
Resources:
blog.robotiq.com/what-is-easy-and-what-is-hard-to-automate
 Collaborative Robots
Collaborative Robots- Repetitive tasks not requiring the robot to apply force - Pick and place - Dispensing
- Part presentation - Little part changeover or changeover among similar parts - Always picked in the same place - Ordered parts and workpieces - If many parts, structured in a matrix or tray
- Part drop-off
- Always dropped in the same place
- Complex logic or decision making
- Sensors - Vision - Force torque sensor
- Parts - High changeover rates of parts with divergent properties (size, shape) - Deformable parts
- Part presentation - Moving conveyors - Unstructured presentation (bins)
- Integrating communication with other machines
- Force controlled processes - Grinding - Polishing - Drilling - Fine assembly
- Processes requiring specialized tools or human know-how - Welding - Painting
Easy or Hard to AutomateThanks for helping to keep our community civil!
Notify staff privately
You flagged this as spam. Undo flag.Flag Post
It's Spam
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
Report Reason
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
✅ Your Post Has Been Submitted Successfully!
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!