

Collaborative Robots - Chapter 1: What Can Collaborative Robots Do?


Collaborative Robots – Chapter 1: What Can Collaborative Robots Do?
Collaborative Robots – Chapter 2: How to Identify Potential Processes For Automation
For my first contribution to the Robotshop blog I will be writing on: How to get started with collaborative robots. In the first chapter, we’ll explore the possibilities provided by collaborative robots. This will be useful when you'll start looking around the factory floor for places with automation potential.
Although collaborative robots are a new technology, this does not mean that they are necessarily complex. In fact, it’s the complete opposite. While traditional robots have evolved to satisfy the need for high volume industries, collaborative robots have been designed for the challenges of high mix manufacturing found in all SMEs.
Just like traditional robots, collaborative robots can:
 Collaborative Robot
Here are a couple of examples of what can be done using collaborative robots:
Collaborative Robot
Here are a couple of examples of what can be done using collaborative robots:
- Move parts around; grasping a part, do a certain operation and replace the part.
- Follow a path to perform a process; it can avoid obstacles and do pretty much every motions you can think of.
- Work autonomously for extended periods of time; increasing productivity and quality
But unlike traditional industrial robots, collaborative robots:
- Are simple and fast to program by non-experts. Think - half a day of onsite training, compared to 2-days of offsite classes for industrial robots.
- Have a small footprint and are safe. Most applications don't require fencing (thanks to the force sensors in the robot joints).
- Are simple to integrate for simple tasks. These are the tasks you should start with.
- Can be repurposed easily for new tasks because of their lightweight and easy to use programming method.
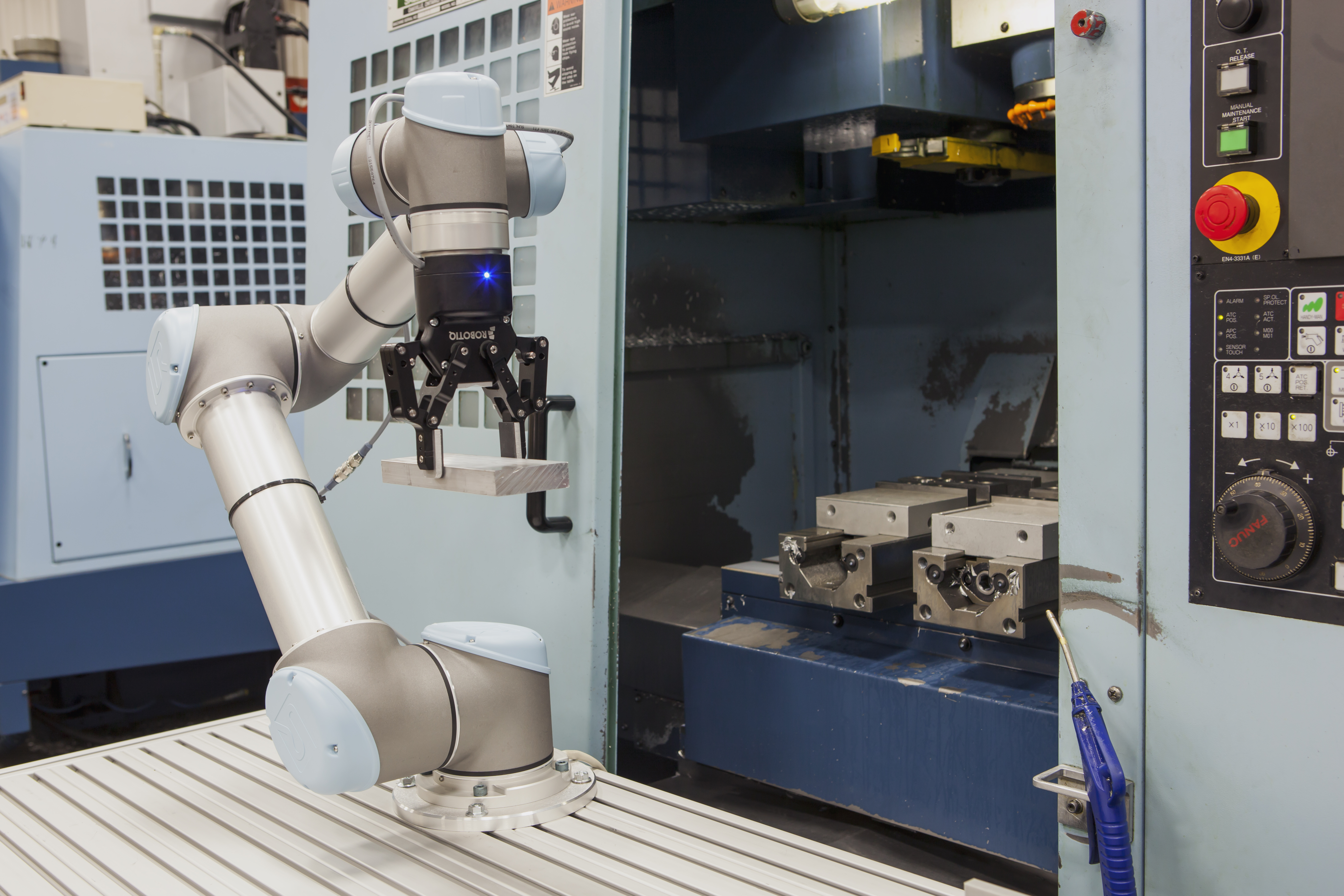
Collaborative Robot- Machine Tending: Placing a part in a machine for processing. The robot can load and unload the part, hence freeing the operator from this redundant task. It is probably the most popular application for this kind of robot since it is space effective, not too expensive and can be easily integrate beside a CNC machine.
- Pick-and-place: Moving a part from the output of one process to the input of the next. For example, grabbing parts from a bin and ordering them on a tray. Here again, this is a non-value added task that frees the operator. We have seen several warehouse using these robots to automate their process and achieve their ''24hrs delivery guarantee''.
- Lightweight applications: Most applications that can be done by a human without requiring dexterity can be done by a collaborative robot. A great application for full human-robot collaboration is where the robot is moving the part and the operator is using his/her dexterity to assemble the part.
Thanks for helping to keep our community civil!
Notify staff privately
You flagged this as spam. Undo flag.Flag Post
It's Spam
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
Report Reason
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
✅ Your Post Has Been Submitted Successfully!
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!