

Building A BEAM Symet


How to build a BEAM symet.
 The symet for
some reason always tends to be a three fold rotation symmetrical robot,
but I like to push the envelop a little. The Quaret, hence its name, is a
four fold rotation symmetrical robot. It's very small, very active, and a
lot of fun to watch. So enough chit chat lets find some parts!
List of
parts
(most are available at DigiKey)
-1 x cassette tape player motor (or equivalent)
-1 x Solar panel (i use the Panasonic
sunceram 37x33mm)
-Coil of heavy gauge wire (copper is good,
but anything will work!)
-1 x 2.2k resistor
-1 x CMOS 1381J (The letter denotes the
voltage it is triggered at, try some higher or lower voltage
ones if you want!)
-1 x 2N3904 NPN transistor
-1 x 2N3906 PNP transistor
-4 x 1000uF capacitors (these can be
substituted for any rating wanted, just remember, the more capacitance the
longer charge)
-small diameter heat shrink (for motor
actuator)
-4 x small washers (you'll see)
-plenty of electrical tape!
Now go find those parts!!
Now that
you have the parts
So you finally got all of the parts, good! It's a
lot easier to build this bot when you have all those parts lying right in
front of you, trust me!
Lets build
our chassis
The symet for
some reason always tends to be a three fold rotation symmetrical robot,
but I like to push the envelop a little. The Quaret, hence its name, is a
four fold rotation symmetrical robot. It's very small, very active, and a
lot of fun to watch. So enough chit chat lets find some parts!
List of
parts
(most are available at DigiKey)
-1 x cassette tape player motor (or equivalent)
-1 x Solar panel (i use the Panasonic
sunceram 37x33mm)
-Coil of heavy gauge wire (copper is good,
but anything will work!)
-1 x 2.2k resistor
-1 x CMOS 1381J (The letter denotes the
voltage it is triggered at, try some higher or lower voltage
ones if you want!)
-1 x 2N3904 NPN transistor
-1 x 2N3906 PNP transistor
-4 x 1000uF capacitors (these can be
substituted for any rating wanted, just remember, the more capacitance the
longer charge)
-small diameter heat shrink (for motor
actuator)
-4 x small washers (you'll see)
-plenty of electrical tape!
Now go find those parts!!
Now that
you have the parts
So you finally got all of the parts, good! It's a
lot easier to build this bot when you have all those parts lying right in
front of you, trust me!
Lets build
our chassis
 Gather together your tape player motor, your
large value caps, and some heavy gauge wire. To build you chassis you'll
need to glue you caps onto the sides of the motor, just remember we need
to put those caps in a parallel circuit. You should either glue the caps
with all the positive ends facing out, or with all the negative ends
facing out (see illustration).
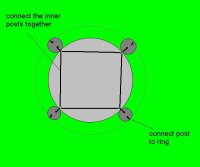
Once you have all of those caps on there, you
need to solder the post together (see illustration). The outside post
probably won't reach each other, so get that wire out. Make the wire into
a small ring just big enough to fit around the posts, solder it into the
ring. Then take and solder all those posts onto the ring (see
illustration). The last step is to solder the inner post together, these
should reach each other but if they don't, use the wire again.
Gather together your tape player motor, your
large value caps, and some heavy gauge wire. To build you chassis you'll
need to glue you caps onto the sides of the motor, just remember we need
to put those caps in a parallel circuit. You should either glue the caps
with all the positive ends facing out, or with all the negative ends
facing out (see illustration).
Once you have all of those caps on there, you
need to solder the post together (see illustration). The outside post
probably won't reach each other, so get that wire out. Make the wire into
a small ring just big enough to fit around the posts, solder it into the
ring. Then take and solder all those posts onto the ring (see
illustration). The last step is to solder the inner post together, these
should reach each other but if they don't, use the wire again.
 (click for bigger pic)
On to the
SE
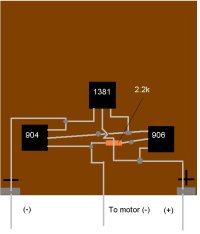
Lets define what exactly a solar engine is
Solar Engine - a circuit used to drive a
motor which requires several tens of milliamps, with a solar
panel that produces only a few milliamps.
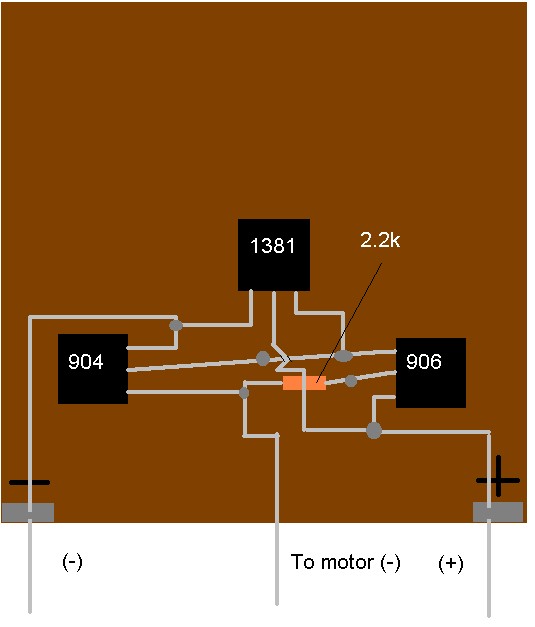
See the illustration for the freeformed layout of
the 1381J SE. Pretty simple. If you've been involved with BEAM before,
this circuit should seem quite familiar! Keep in mind when you make this
circuit that you want to have plenty of lead to solder to, but not to much
that its a burden.
Combining
(click for bigger pic)
On to the
SE
Lets define what exactly a solar engine is
Solar Engine - a circuit used to drive a
motor which requires several tens of milliamps, with a solar
panel that produces only a few milliamps.
See the illustration for the freeformed layout of
the 1381J SE. Pretty simple. If you've been involved with BEAM before,
this circuit should seem quite familiar! Keep in mind when you make this
circuit that you want to have plenty of lead to solder to, but not to much
that its a burden.
Combining
 (click for bigger pic)
You have the SE and the chassis lying next to
each other, right? From here on out its a piece of cake. First thing to do
is to solder you positive and negative leads to the rings on the caps,
once you have that take you motor (some motor might have wire leads, some
have solder tabs, use precaution either way, even the best screw up
motors!) and hook it up according to the drawing of the SE, that middle
lead goes to the negative and then you can hook up the other end to the
positive (you can reverse that so the motor positive goes to the middle
lead, but I just happened to draw it that way). Those leads should be
stiff enough to hold up that solar cell, but if they aren't, you can use
glue or anything to hold it down, just make sure it works first!
Finishing
touches
(click for bigger pic)
You have the SE and the chassis lying next to
each other, right? From here on out its a piece of cake. First thing to do
is to solder you positive and negative leads to the rings on the caps,
once you have that take you motor (some motor might have wire leads, some
have solder tabs, use precaution either way, even the best screw up
motors!) and hook it up according to the drawing of the SE, that middle
lead goes to the negative and then you can hook up the other end to the
positive (you can reverse that so the motor positive goes to the middle
lead, but I just happened to draw it that way). Those leads should be
stiff enough to hold up that solar cell, but if they aren't, you can use
glue or anything to hold it down, just make sure it works first!
Finishing
touches
 (click for bigger pic)
It works, but doesn't move to well, eh? This is
where the heat shrink and washers come in. first off, take some heat
shrink and put it on that motor shaft, chances are that it will slip off
right away. To rectify that put on another layer. From there you can add
as many layers as you see fit, just remember, to get that nice rounded
finish, cut the inner most ones shorter than the outer ones so they shrink
inward to round off the edges. Now your Quaret works, but goes in little
circles. It's time to talk about symet behavior.
Symets exhibit random behavior depending on their
surroundings and the available light. The key to making a symet
interesting to watch lies in the angle it leans at. If your symet leans at
a 20 degree or more angle, chance are that its hard to tip and it just
makes little circles. If you symet leans at a 18 degree or less angle it
will travel almost in a straight line. If its too small an angle, it will
tip ever trigger. So here's the down low on getting it to travel straight.
The symet should trigger and the edge its leaning on should cause it to
turn, but if you decrease the leaning angle, the motor shaft is more
perpendicular to the ground causing it to torque the symet the opposite
direction of the turn, making it travel straight!
The washer can be glued to the bottoms of the
caps (see picture) to rectify angle. use hot glue here, this way, if want
to move them to adjust angle, take a heat shrink gun (or equivalent,
a.k.a. something hot) and melt the glue so you can move the washer.
One more finishing touch is to add electrical
tape around the edges of the solar panel, it help to protect you solar
panel from nicks and cuts. Just remember, A for aesthetics, keep it
pretty!
How does it
work?
By now your Quaret should be up and running, work
well? I hope so, cause i was pleased with mine. Now its your turn to
experiment, Symets are so simple you can easily come up with your own
plans. Hope you no longer refer to them as the brainless 'bots, because a
good symet can even display problem solving abilities, as well as brute
strength.
KEEP ON BEAMing!!!
-Spencer
Editors note: This
tutorial uses the voltage detector Solar Engine circuit. One thing I don't
like about this is that all these parts (electrical) aren't readily
available. Check out Ben Hitchcocks tutorial on how to
build a Photovore! To find out more about robots similar to Symets, join the BEAM
e-mail list, by sending an e-mail to [email protected]
(click for bigger pic)
It works, but doesn't move to well, eh? This is
where the heat shrink and washers come in. first off, take some heat
shrink and put it on that motor shaft, chances are that it will slip off
right away. To rectify that put on another layer. From there you can add
as many layers as you see fit, just remember, to get that nice rounded
finish, cut the inner most ones shorter than the outer ones so they shrink
inward to round off the edges. Now your Quaret works, but goes in little
circles. It's time to talk about symet behavior.
Symets exhibit random behavior depending on their
surroundings and the available light. The key to making a symet
interesting to watch lies in the angle it leans at. If your symet leans at
a 20 degree or more angle, chance are that its hard to tip and it just
makes little circles. If you symet leans at a 18 degree or less angle it
will travel almost in a straight line. If its too small an angle, it will
tip ever trigger. So here's the down low on getting it to travel straight.
The symet should trigger and the edge its leaning on should cause it to
turn, but if you decrease the leaning angle, the motor shaft is more
perpendicular to the ground causing it to torque the symet the opposite
direction of the turn, making it travel straight!
The washer can be glued to the bottoms of the
caps (see picture) to rectify angle. use hot glue here, this way, if want
to move them to adjust angle, take a heat shrink gun (or equivalent,
a.k.a. something hot) and melt the glue so you can move the washer.
One more finishing touch is to add electrical
tape around the edges of the solar panel, it help to protect you solar
panel from nicks and cuts. Just remember, A for aesthetics, keep it
pretty!
How does it
work?
By now your Quaret should be up and running, work
well? I hope so, cause i was pleased with mine. Now its your turn to
experiment, Symets are so simple you can easily come up with your own
plans. Hope you no longer refer to them as the brainless 'bots, because a
good symet can even display problem solving abilities, as well as brute
strength.
KEEP ON BEAMing!!!
-Spencer
Editors note: This
tutorial uses the voltage detector Solar Engine circuit. One thing I don't
like about this is that all these parts (electrical) aren't readily
available. Check out Ben Hitchcocks tutorial on how to
build a Photovore! To find out more about robots similar to Symets, join the BEAM
e-mail list, by sending an e-mail to [email protected]
The symet for
some reason always tends to be a three fold rotation symmetrical robot,
but I like to push the envelop a little. The Quaret, hence its name, is a
four fold rotation symmetrical robot. It's very small, very active, and a
lot of fun to watch. So enough chit chat lets find some parts!
List of
parts
(most are available at DigiKey)
-1 x cassette tape player motor (or equivalent)
-1 x Solar panel (i use the Panasonic
sunceram 37x33mm)
-Coil of heavy gauge wire (copper is good,
but anything will work!)
-1 x 2.2k resistor
-1 x CMOS 1381J (The letter denotes the
voltage it is triggered at, try some higher or lower voltage
ones if you want!)
-1 x 2N3904 NPN transistor
-1 x 2N3906 PNP transistor
-4 x 1000uF capacitors (these can be
substituted for any rating wanted, just remember, the more capacitance the
longer charge)
-small diameter heat shrink (for motor
actuator)
-4 x small washers (you'll see)
-plenty of electrical tape!
Now go find those parts!!
Now that
you have the parts
So you finally got all of the parts, good! It's a
lot easier to build this bot when you have all those parts lying right in
front of you, trust me!
Lets build
our chassis
Gather together your tape player motor, your
large value caps, and some heavy gauge wire. To build you chassis you'll
need to glue you caps onto the sides of the motor, just remember we need
to put those caps in a parallel circuit. You should either glue the caps
with all the positive ends facing out, or with all the negative ends
facing out (see illustration).
Once you have all of those caps on there, you
need to solder the post together (see illustration). The outside post
probably won't reach each other, so get that wire out. Make the wire into
a small ring just big enough to fit around the posts, solder it into the
ring. Then take and solder all those posts onto the ring (see
illustration). The last step is to solder the inner post together, these
should reach each other but if they don't, use the wire again.
(click for bigger pic)
On to the
SE
Lets define what exactly a solar engine is
Solar Engine - a circuit used to drive a
motor which requires several tens of milliamps, with a solar
panel that produces only a few milliamps.
See the illustration for the freeformed layout of
the 1381J SE. Pretty simple. If you've been involved with BEAM before,
this circuit should seem quite familiar! Keep in mind when you make this
circuit that you want to have plenty of lead to solder to, but not to much
that its a burden.
Combining
 (click for bigger pic)
You have the SE and the chassis lying next to
each other, right? From here on out its a piece of cake. First thing to do
is to solder you positive and negative leads to the rings on the caps,
once you have that take you motor (some motor might have wire leads, some
have solder tabs, use precaution either way, even the best screw up
motors!) and hook it up according to the drawing of the SE, that middle
lead goes to the negative and then you can hook up the other end to the
positive (you can reverse that so the motor positive goes to the middle
lead, but I just happened to draw it that way). Those leads should be
stiff enough to hold up that solar cell, but if they aren't, you can use
glue or anything to hold it down, just make sure it works first!
Finishing
touches
(click for bigger pic)
You have the SE and the chassis lying next to
each other, right? From here on out its a piece of cake. First thing to do
is to solder you positive and negative leads to the rings on the caps,
once you have that take you motor (some motor might have wire leads, some
have solder tabs, use precaution either way, even the best screw up
motors!) and hook it up according to the drawing of the SE, that middle
lead goes to the negative and then you can hook up the other end to the
positive (you can reverse that so the motor positive goes to the middle
lead, but I just happened to draw it that way). Those leads should be
stiff enough to hold up that solar cell, but if they aren't, you can use
glue or anything to hold it down, just make sure it works first!
Finishing
touches
 (click for bigger pic)
It works, but doesn't move to well, eh? This is
where the heat shrink and washers come in. first off, take some heat
shrink and put it on that motor shaft, chances are that it will slip off
right away. To rectify that put on another layer. From there you can add
as many layers as you see fit, just remember, to get that nice rounded
finish, cut the inner most ones shorter than the outer ones so they shrink
inward to round off the edges. Now your Quaret works, but goes in little
circles. It's time to talk about symet behavior.
Symets exhibit random behavior depending on their
surroundings and the available light. The key to making a symet
interesting to watch lies in the angle it leans at. If your symet leans at
a 20 degree or more angle, chance are that its hard to tip and it just
makes little circles. If you symet leans at a 18 degree or less angle it
will travel almost in a straight line. If its too small an angle, it will
tip ever trigger. So here's the down low on getting it to travel straight.
The symet should trigger and the edge its leaning on should cause it to
turn, but if you decrease the leaning angle, the motor shaft is more
perpendicular to the ground causing it to torque the symet the opposite
direction of the turn, making it travel straight!
The washer can be glued to the bottoms of the
caps (see picture) to rectify angle. use hot glue here, this way, if want
to move them to adjust angle, take a heat shrink gun (or equivalent,
a.k.a. something hot) and melt the glue so you can move the washer.
One more finishing touch is to add electrical
tape around the edges of the solar panel, it help to protect you solar
panel from nicks and cuts. Just remember, A for aesthetics, keep it
pretty!
How does it
work?
By now your Quaret should be up and running, work
well? I hope so, cause i was pleased with mine. Now its your turn to
experiment, Symets are so simple you can easily come up with your own
plans. Hope you no longer refer to them as the brainless 'bots, because a
good symet can even display problem solving abilities, as well as brute
strength.
KEEP ON BEAMing!!!
-Spencer
Editors note: This
tutorial uses the voltage detector Solar Engine circuit. One thing I don't
like about this is that all these parts (electrical) aren't readily
available. Check out Ben Hitchcocks tutorial on how to
build a Photovore! To find out more about robots similar to Symets, join the BEAM
e-mail list, by sending an e-mail to [email protected]
(click for bigger pic)
It works, but doesn't move to well, eh? This is
where the heat shrink and washers come in. first off, take some heat
shrink and put it on that motor shaft, chances are that it will slip off
right away. To rectify that put on another layer. From there you can add
as many layers as you see fit, just remember, to get that nice rounded
finish, cut the inner most ones shorter than the outer ones so they shrink
inward to round off the edges. Now your Quaret works, but goes in little
circles. It's time to talk about symet behavior.
Symets exhibit random behavior depending on their
surroundings and the available light. The key to making a symet
interesting to watch lies in the angle it leans at. If your symet leans at
a 20 degree or more angle, chance are that its hard to tip and it just
makes little circles. If you symet leans at a 18 degree or less angle it
will travel almost in a straight line. If its too small an angle, it will
tip ever trigger. So here's the down low on getting it to travel straight.
The symet should trigger and the edge its leaning on should cause it to
turn, but if you decrease the leaning angle, the motor shaft is more
perpendicular to the ground causing it to torque the symet the opposite
direction of the turn, making it travel straight!
The washer can be glued to the bottoms of the
caps (see picture) to rectify angle. use hot glue here, this way, if want
to move them to adjust angle, take a heat shrink gun (or equivalent,
a.k.a. something hot) and melt the glue so you can move the washer.
One more finishing touch is to add electrical
tape around the edges of the solar panel, it help to protect you solar
panel from nicks and cuts. Just remember, A for aesthetics, keep it
pretty!
How does it
work?
By now your Quaret should be up and running, work
well? I hope so, cause i was pleased with mine. Now its your turn to
experiment, Symets are so simple you can easily come up with your own
plans. Hope you no longer refer to them as the brainless 'bots, because a
good symet can even display problem solving abilities, as well as brute
strength.
KEEP ON BEAMing!!!
-Spencer
Editors note: This
tutorial uses the voltage detector Solar Engine circuit. One thing I don't
like about this is that all these parts (electrical) aren't readily
available. Check out Ben Hitchcocks tutorial on how to
build a Photovore! To find out more about robots similar to Symets, join the BEAM
e-mail list, by sending an e-mail to [email protected]
Thanks for helping to keep our community civil!
Notify staff privately
You flagged this as spam. Undo flag.Flag Post
It's Spam
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
Report Reason
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post
✅ Your Post Has Been Submitted Successfully!
Your post is currently under review by our moderation team. The review process usually takes up to 48 business hours.
You can track your post's status in the "My Content" section of your profile. Once approved, it will be published and visible to others.

Thank you for contributing to our community!