



Encoders are devices that generate output signal based on their linear or rotational movement. When encoders generate signal as an array of digital impulses, they are usually called digital encoders. By simple counting of individual bits or decoding array of the bits, impulses can be translated into relative or absolute measurement of position, speed, acceleration and direction detection.
Generally, we can divide encoders into:
- Mechanical encoders
- Magnetic encoders
- Optical encoders

Mechanical encoder from RobotShop

Magnetic encoder from RobotShop

Optical encoder from RobotShop
Most of modern encoders work on photoelectric scanning of certain scale while moving so we call them digital optical encoders.
Encoders can be :
- Rotary encoders (as shown on previous images)
- Linear encoders

Source: LinearMotionTips
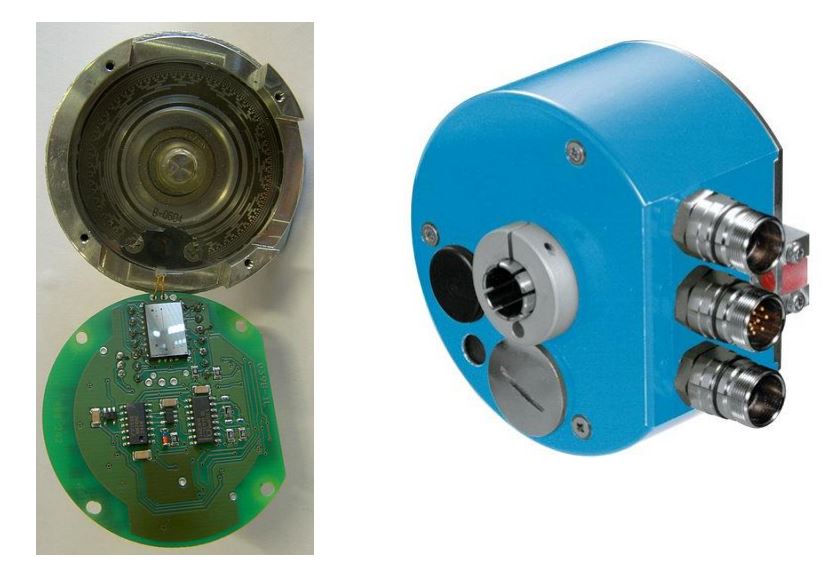
Rotary encoders generate digital impulses when the shaft, where the encoder is attached, is rotating. In that way, it is possible to measure relative or absolute rotary angle of the shaft.
Linear encoders generate digital impulses when the part where the encoder is attached has translational movement in certain direction. In that way, we can measure relative or absolute coordinates of certain point.
Generally, rotary encoders are used more often than linear encoders.
Incremental encoders are measuring relative movement regarding some known initial coordinate. Position measurement using incremental encoder is done by counting impulses from encoder. That's why incremental encoders are often called counting encoders. They are used for position detection and velocity measurement.
Mechanical incremental encoders are often used as digital potentiometers in various equipment. Most of the modern home and car entertainment audio systems use mechanical incremental rotary encoders for volume control. They are used because of their low price.

Source: albates.com
Digital incremental rotary encoders can use either optical or magnetic sensing technology. Optical technology provides high resolution, high operating speed, and reliability, long life operation in most environments. Magnetic technology is often used in rugged applications provides good resolution, high operating speed, and maximum resistance to dust, moisture, and thermal and mechanical shock.
Operational principle
The operational principle of an optical encoder is simple. A photo-emitting diode sends light through a mobile disk, consisting of a succession of opaque and transparent parts, on photo-receivers. When the disk or the scale moves, it conveys or alternatively blocks the light emitted by the source. The disk acts in fact as a beam switch. The photoreceptor generates an electrical signal, which is processed and analyzed in order to allow encoding the system position.


Encoders based on magnetic technology use more less the same principle. The only difference is that the source is not light but a magnetic field. The magnetic encoder uses a series of magnetic poles (2 or more) to represent the encoder position to a magnetic sensor (typically magneto-resistive or Hall Effect). The magnetic sensor reads the magnetic pole positions.
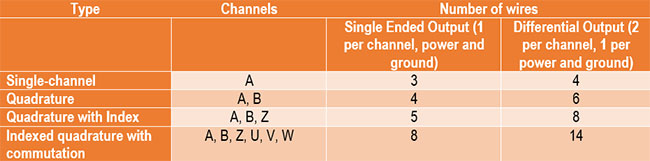
Incremental encoders wiring
Incremental encoders will require one wire for power, one wire for ground, and one wire for each additional channel.
Incremental encoders are available in a variety of types including:
- Single-channel encoder designs (A channel) to track speed and displacement
- Quadrature encoder designs (A and B channels), which also track direction
- Quadrature encoder designs with an additional index channel (Z channel) to establish a home position once per revolution
- Encoders with additional commutation tracks (U, V, and W channels)
Same as incremental encoders, absolute encoders can be mechanical, optical or magnetic.
Most common ones are digital absolute encoders based on optical sensing technology. Digital absolute encoders produce a unique digital code for each distinct angle of the shaft.
Source: Wikipedia
{kind=link}
Operational principle
Digital absolute encoders based on optical sensing technology can have up to 12 photo-diodes where diode closest to the center gives one impulse per rotation and diode on the edge of the disk gives 2048 impulses per revolution. Encoder with 3 photo-diodes can signal 2 x 2 x 2 = 8 angular positions, because its diode from the edge gives 4 impulses per revolution, diode near the center gives one impulse per revolution and the middle diode gives 2 impulses per revolution.


Absolute encoders wiring
Absolute encoders transmit absolute position as a multi-bit digital word. They can be connected using parallel wiring, fieldbus, or point-to-point wiring. The number of conductors needed for each type varies.

First, incremental encoders are much cheaper than absolute encoders. They are less complex and because of that, they are less expensive. Other main difference is regarding power. Incremental encoder must be powered all the time during usage while absolute encoder can be powered only when the reading is taken. At the end, output signal of incremental encoder is generated every time when shaft rotates at a certain angle while absolute encoder has unique combination for each position of the shaft which represents the absolute position of an encoder.