


A custom robot design often starts with a "vision" of what the robot will look like and what it will do. The types of robots possible are unlimited, though the more popular are:
- Land-based wheeled robot
- Land-based tracked robot
- Land-based legged robot
- Air-based: plane, helicopter, blimp
- Water-based; boat, submarine
- Misc. and combination robot
- Stationary robot (arm, manipulator, etc.)
Land-based wheeled robots are the most popular mobile robots among beginners as they usually require the least investment while providing significant exposure to robotics. The most complex type of robot is the autonomous humanoid (resembling a human), as it requires many degrees of freedom, synchronizing many motors and many sensors. This section is intended to help you decide what type of robot to build. Once you have chosen the type of robot, you can brainstorm what tasks/functions you want it to complete.
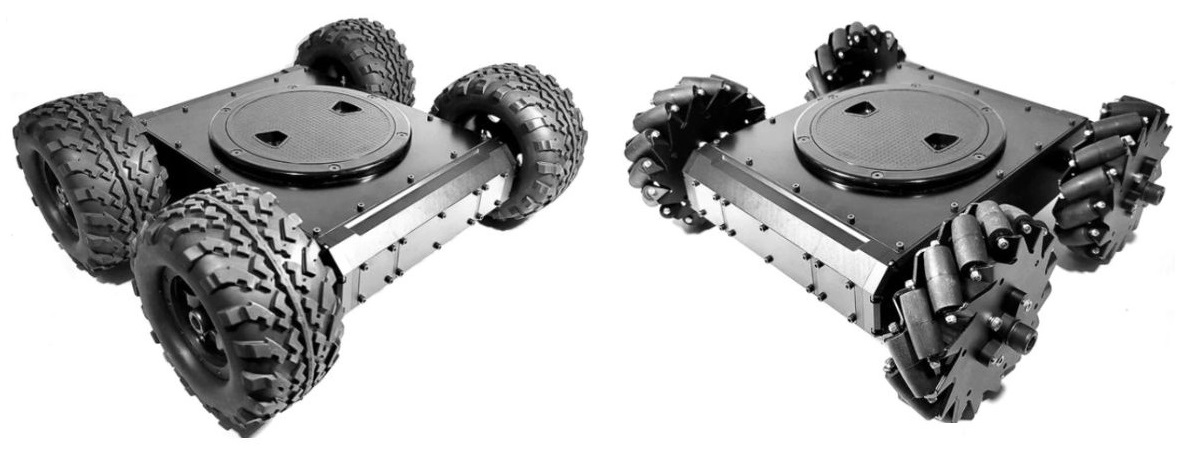
Wheels are by far the most popular method of providing robot mobility and are used to propel many different-sized robots and robotic platforms. Wheels can be just about any size, from fractions of an inch to 10 to 12 inches. Tabletop robots tend to have the smallest wheels, usually less than 2 inches in diameter. Robots can have just about any number of wheels, although 3 and 4 are the most common. Normally a three-wheeled robot uses two wheels and a caster at one end. More complex two-wheeled robots use gyroscopic stabilization. It is rare that a wheeled robot uses anything but skid steering (like that of a tank). Rack and pinion steering such as that found on a car require too many parts and its complexity and cost outweigh most of its advantages. Four and six-wheeled robots have the advantage of using multiple drive motors (one connected to each wheel) which reduces slip. Omni-directional wheels, mounted properly, can give the robot significant mobility advantages. A common misconception about building a wheeled robot is that large, low-cost DC motors can propel a medium-sized robot. As we will see later in this article, there is a lot more involved than just a motor.
Advantages
- Usually low-cost
- Simple design and construction
- Near infinite different dimensions cater to your specific project
- Six wheels can replace a track system
- Diameter, width, material, weight, tread, etc. can all be custom to your needs
- Excellent choice for beginners
Disadvantages
- May lose traction (slip)
- Small contact area (small rectangle or line)
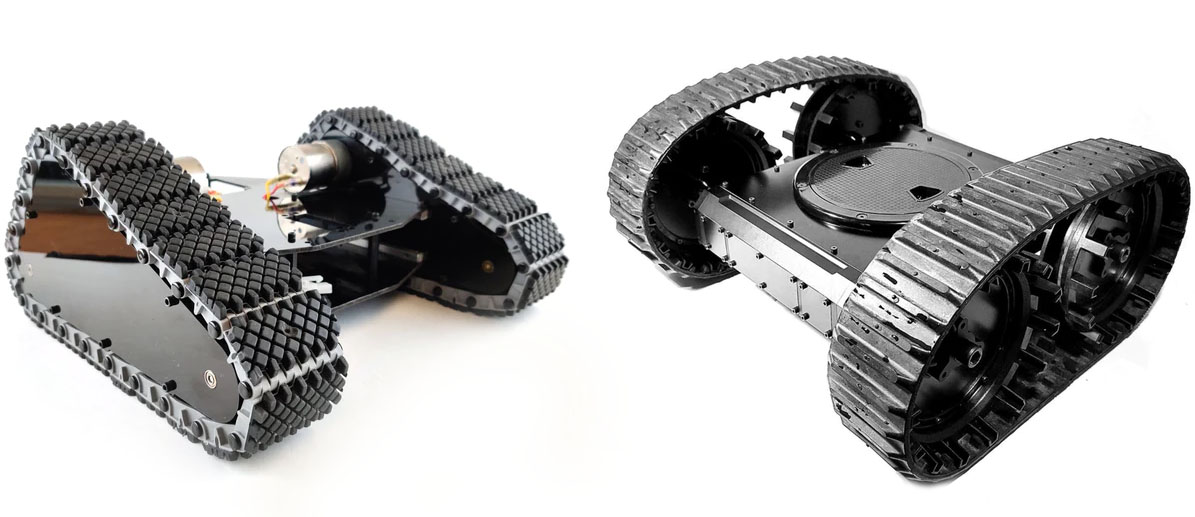
Tracks (or treads) are similar to what tanks use. Track drive is best for robots used outdoors and on soft ground. Although tracks do not provide added "force", they do reduce slip and more evenly distribute the weight of the robot, making them useful for loose surfaces such as sand and gravel. Most people tend to agree that tank tracks add an "aggressive" look to the robot as well.
Advantages
- Constant contact with the ground prevents slipping that might occur with wheels
- Evenly distributed weight helps your robot tackle a variety of surfaces
Disadvantages
- When turning, there is a sideways force that acts on the ground; this can cause damage to the surface the robot is being used on, and cause the tracks to wear.
- Not many different tracks are available (the robot is usually constructed around the tracks)
- Increased mechanical complexity and connections
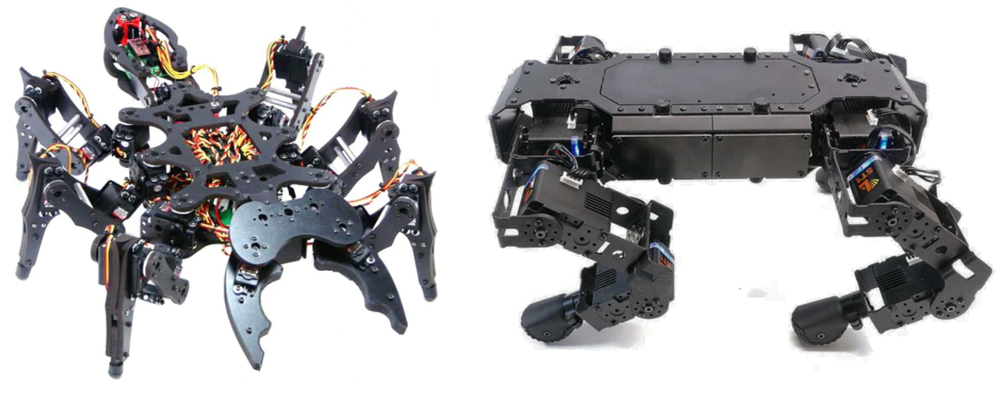
An increasing number of robots use legs for mobility. Legs are often preferred for robots that must navigate on very uneven terrain. Most amateur robots are designed with six legs, which allow the robot to be statically balanced (balanced at all times on 3 legs). Robots with fewer legs are harder to balance. Researchers have experimented with monopod (one-legged "hopping") designs, though bipeds (two legs) and quadrupeds (four legs), and hexapods (6 legs) are the most popular.
Advantages
- Closer to organic/natural motion
- Can potentially overcome large obstacles and navigate very rough terrain
Disadvantages
- Increased mechanical, electronic and coding complexity
- Lower battery size despite increased power demands
- Higher cost to build

An AUAV (Autonomous Unmanned Aerial Vehicle) is very appealing and is entirely within the capability of many robot enthusiasts. However, the advantages of building autonomous unmanned aerial vehicles, especially if you are a beginner, have yet to outweigh the risks. High-altitude AUAV blimps and aircraft may one day be used for communication. When considering an aerial vehicle, most hobbyists still use existing commercial remote-controlled aircraft. Aircraft such as the US military Predator were initially semi-autonomous though in recent years Predator aircraft have flown missions autonomously.
Advantages
- Remote-controlled aircraft have been in existence for decades (good community)
- Excellent for surveillance
Disadvantages
- Entire investment can be lost in one crash.
- Very limited robotic community to provide help for autonomous control

An increasing number of hobbyists, institutions, and companies are developing unmanned underwater vehicles. There are many obstacles yet to overcome to make underwater robots attractive to the wider robotic community though in recent years, several companies have commercialized pool-cleaning robots. Underwater vehicles can use ballast (compressed air and flooded compartments), thrusters, tails, fins, or even wings to submerge. Other aquatic robots such as pool cleaners are useful commercial products.
Advantages
- Most of our planet is water
- Design is almost guaranteed to be unique
- Can be used and/or tested in a pool
Disadvantages
- Robot can be lost in many ways (sinking, leaking, tangled...)
- Most electronic parts do not like water (also consider water falling on electronics when accessing the robot after a dive)
- Surpassing depths of 10m or more can require significant research and investment
- Very limited robotic community to provide help
- Limited wireless communication options

Your idea for a robot may not fall nicely into any of the above categories or may be comprised of several different functional sections. Note again that this guide is intended for mobile robots as opposed to stationary or permanently fixed designs (other than robotic arms and grippers). It is wise to consider this when building a combination / hybrid design, using a modular design (each functional part can be taken off and tested separately). Miscellaneous designs can include hovercraft, snake-like designs, turrets, and more.
Advantages
- Designed and built to meet specific needs
- Multi-tasking and can be comprised of modules
- Can lead to increased functionality and versatility
Disadvantages
- Increased complexity and cost
- Often times parts must be custom designed and built

Although these do not fall under the category of "mobile" robotics, the field of robotics essentially started with arms and end-effectors (devices that attach to the end of an arm such as grippers, magnets, etc). Arms and grippers are the best way for a robot to interact with the environment it is exploring. Simple robot arms can have just one motion, while more complex arms can have a dozen or more unique degrees of freedom.
Advantages
- Very simple to very complex design possibilities
- Easy to make a 3 or 4-degree-of-freedom robot arm (two joints and turning base)
Disadvantages
- Stationary unless mounted on a mobile platform
- Cost to build is proportional to lifting capability