


Yet another newbie's try
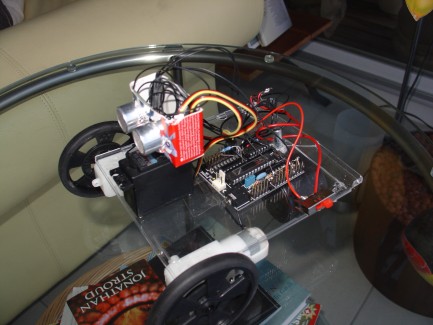
UPDATE: He's back, and better than ever... the amazing Nick! * the crowd goes wild* I know, I've not been aktive on LMR for a while, had a lot of school-work and stuff, so I had no time. Well anyway, I've moved my robot onto a diffrent chaissis, (the other one broke) and added the servo and Srf005. I'm all done with building, but well, you know.... programing isn't my thing. But I'm giving it my all, and i should be done in... *he types something into a calculator* 17 Years!
- - - - - - - - - - - - - - - - - - -
- - - - - - - - - - - - - - - - - - -

- - - - - - - - - - - - - - - - - - -
I will post a vid as soon as I get the thing moving.
Update: I am know in a super mood, because i finally found and fixed my problem.It turned out to be a stupid little soldering mistake. But know I have proggramed my robot to go fowards 3000 and then back 3000. SO far so good :). (Will post vid soon)
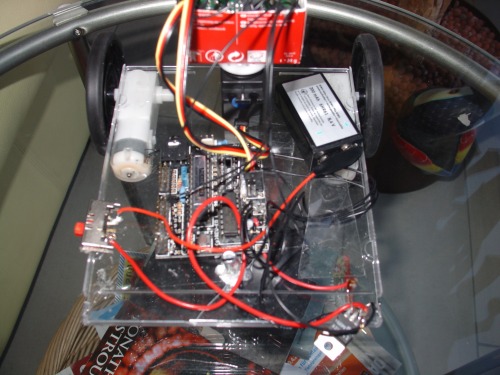
Update: I have hooked up my two motors and soldered them up to A & B. I have also glued the Castor. But somehow the turning isnt totaly in check, one wheel seemsnot to turn.
Yet another newbies try, this is my first robot!!! At the moment its not much, but you just wait, one day it will rule the world!
so far i have:
A CD plastic hull
2 cool motors (with wheels)
a switch, a batterie and a lot of wires.(If need be, up to 15m)
I have for my "third wheel" a exelent castor, from some kind of thing
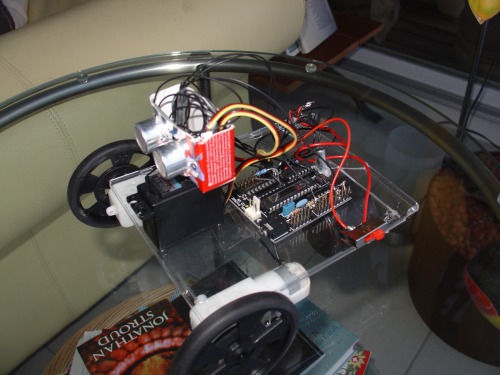
I have my super-di-duper PICAXE 28X1, witch i have already used for a super cool blinky LED proggram
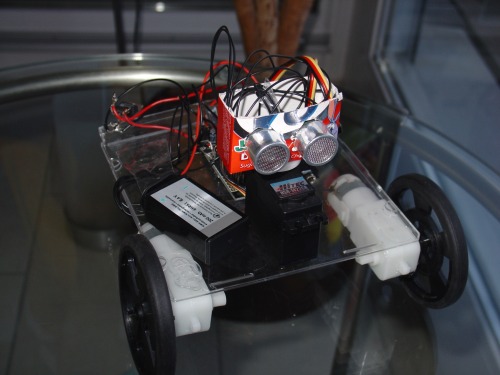
and I have a robotic servo(modified for contin. rotations), and mounted atop is.... My SRF005.
Navigate around with an srf05 (as soon as i get the code right)
- Actuators / output devices: two geared motors, 1 Servo (also not yet)
- Control method: autonomous (not yet)
- CPU: Picaxe 28x1
- Power source: 9V (with 5V regulator)
- Programming language: Picaxe basic
- Sensors / input devices: SRF05 Ultra Sound (not yet)
- Target environment: indoor, or on flat surfaces outside