


YellowBot
My goal is to create an obstacle avoiding mobile platform. I'd like to
add a Raspberry Pi to supply remote communitions and some control.
The platform should be able to independently navigate our normal household
without getting stuck in/under something or falling down the stairwell.
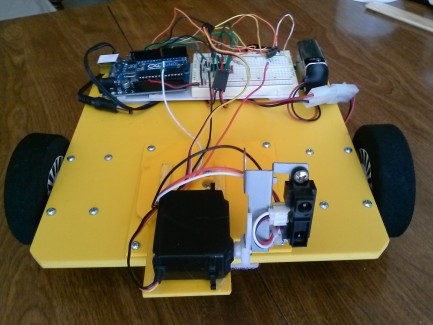
Obstacle avoidance is achieved using a Sharp IR distance sensor. The sensor
is mounted on a servo that sits on a rotating base. This allows for X and
Y axis movement. This allows the same sensor to be used to detect vertical
obstacles in front of and above the platform as well as detecting dropoffs.
This is a project that I started well over 10 years ago. I bought a
Lnyxmotion kit and a wonderfully elaborate micro controller. The
Lynxmotion kit was the Mobile Five Axis Robotic Arm Kit. A great setup,
you got a two wheel mobile platform and a 3 axis arm with gripper.
Lynxmotion recommended using a Basic Stamp PIC controller to drive
the servos and sensors. Well I had been doing some research and found
a great controller board that used the Motorola M68HC11 and a mated
MC68HC24. This gave you many digital input/outputs along with serial
ports and other goodies. Well that nice complex controller was a part
of the initial reason for shelving this project all those years ago.
Getting started was too complex. Couldn't get a grip on establishing the
correct interfacing circuitry or the programming. So things got shelved.
Then along came the Arduino. While talking to a friend about solar panel
projects I got to wondering about controlling and monitoring a solar panel
setup. So I got an Aruino, went through the tutorials and learned. I
was able to put together some decent monitoring software and circuits. Then
I remembered that I had all of this cool robotics stuff stashed away! Yep,
I started figuring out how to use the Arduino to control the platform. Gave
up on the arm and gripper portion of the kit. It just wasn't useful to me.
Obstacle avoidance via IR sensor.
- Actuators / output devices: 4 servos
- CPU: Arduino
- Power source: Battery
- Programming language: C++
- Sensors / input devices: Sharp IR
- Target environment: indoors