


YASHR - yet another start here robot
This is my "start here" robot.
It is not very solid yet... i'm working on that, and also on the code... trying something similar to the navigation from part 2 but with the hardware from part 1 of the "start here" robot.
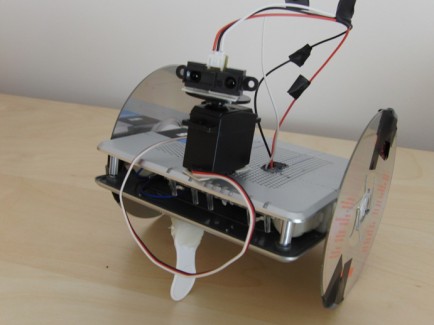
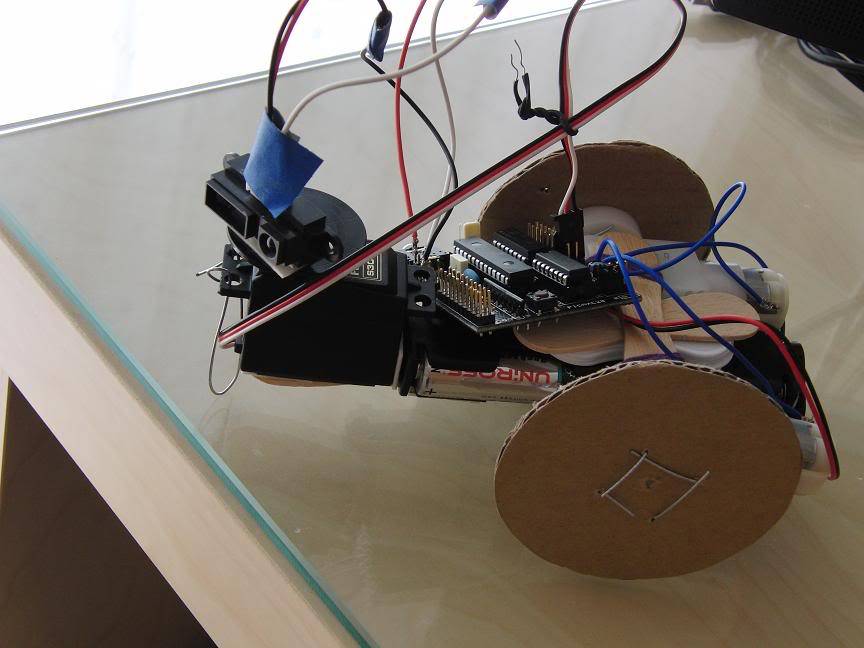
It was built with some ice cream sticks for the body, cardboard for the wheels, everything attached with double sided tape, blue tape, and some cotton thread.
As you can see in the video this is just an initial prototype and it still does fall apart sometimes.
I'm thinking of using an old router body to house the components decently.
Also, the wheels are temporary - i made a mistake when ordering them, and only noticed when they arrived by mail... then i saw they were way too small... so i just attatched the cardboard wheels, since they where the easiest to attach i could think of... (CDs are better, but would be harder to attach)
*** UPDATE *** 15/09/2009 ***
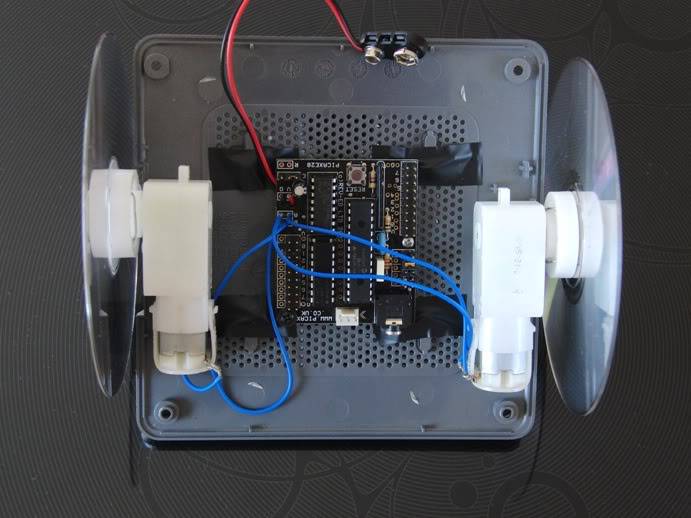
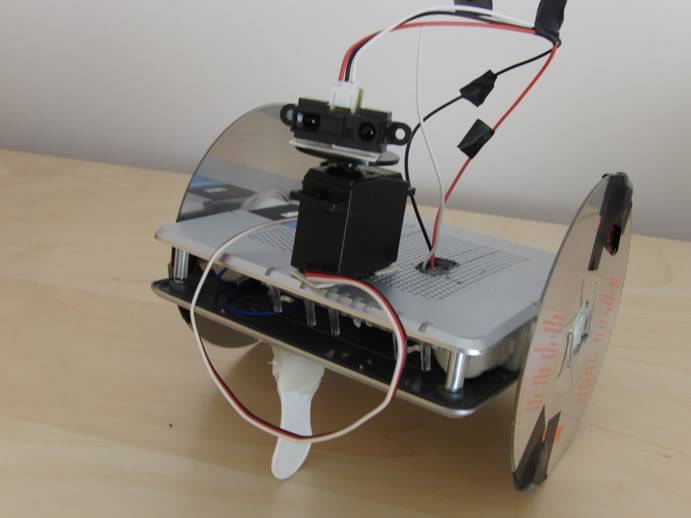
New body and wheels, old router as body, cds as wheels with 2 little pieces of rubber taped to act somewhat like tires
thanks to Aniss1001 for the cds attachment tip :)
goes around the room trying to not bump into walls
- Actuators / output devices: 2 geared motors, 1 Servo
- CPU: Picaxe 28x1
- Operating system: Picaxe 28x1
- Power source: 4 AA batteries
- Programming language: Picaxe basic
- Sensors / input devices: Sharp IR GP2D12
- Target environment: indoor flat surfaces mainly