


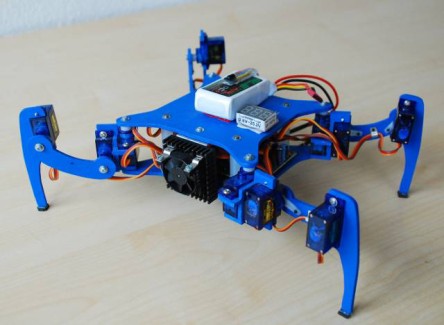
YAQ - Yet Another Quadrupedal
YAQ - Yet Another Quadrupedal - is a four legged walking robot. This project demonstrates utilization of various crawling gaits to achieve synchronized movement of the robot. Each of the tested gaits is statically balanced, the dynamically balanced gaits are outside the possibilities of this project. The mechanical construction uses 3 mm plywood and budget 9 gram servos. One compact PCB accommodates complete electronics, which consists of micro-controller Atmel Mega168, custom made servo shield based on two Johnson decade counters, IR receiver and two independent power sources. The complete documentation including videos is on the project home page.
The source files and full documentation including video sequences is posted [Code Project]
Project demonstrates various statically balanced gaits of a quadpod.
- Actuators / output devices: 12 TowerPro 9g servos
- Control method: IR (Mitsubishi Sat Protocol)
- CPU: Atmel Mega168
- Operating system: none
- Power source: 7, 2V LiPol
- Programming language: C
- Sensors / input devices: IR (OS1838)
- Target environment: indoor