



The packing list includes: packing box, instruction manual, car extension board(with motor and mounting bracket), tires, infrared remote controller, rechargeable battery, tracking map, TF card+card reader.
BBC Micro:bit Board(Optional)
Note: If you purchase with the Microbit board, your package will include Micro:bit board. If you purchase not include Micro:bit, you need prepare BBC Micro:bit by yourself.
Our Robot Car needs to be used with the Board.

1.Remove the M3*6mm screws on the K210 module. And install the M3*6mm screw fixing bracket to the K210 module.
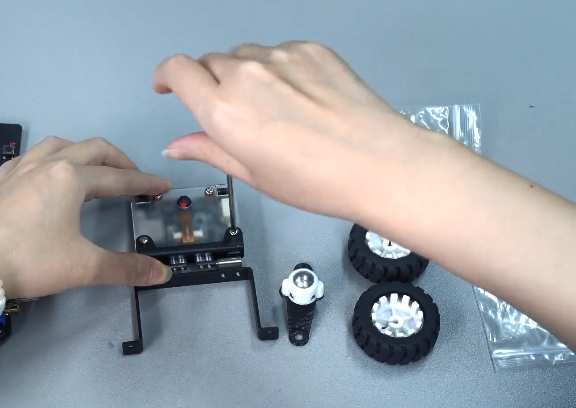
2. Install universal wheel.
3. Install Trie .

4. Install K210 module on Tinybit car .

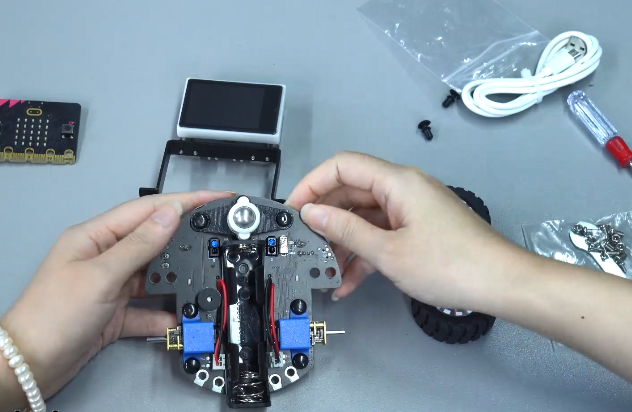
5. Insert Microbit board.

Something cute and funny! Do you like this "guy"?
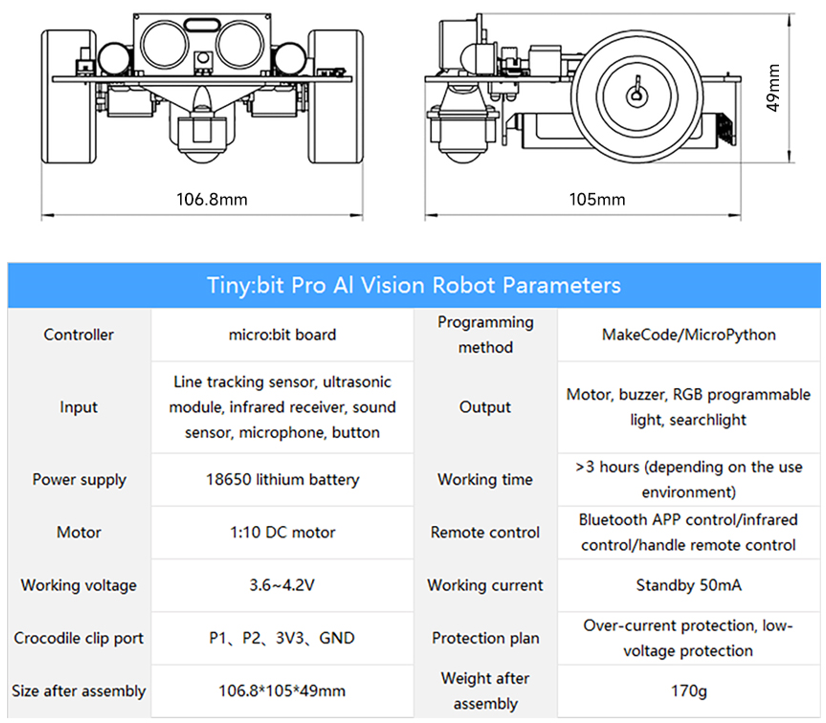
Front: Ultrasonic, sound sensor, high-brightness searchlight, infrared remote control receiver, programmable colorful RGB lights, alligator clip interface, PH2.0-4PIN serial port interface.
Back: Tracking sensor, buzzer, motor socket, serial port switch.
Since it is a robot car that extended Micro:bit, it can block coding with MakeCode.
How to add Tiny:bit Pro block
Please access below and click "New Project"https://makecode.microbit.org/
Click the setting icon -> Extension
Basic function for Tiny:bit Pro library
https://github.com/YahboomTechnology/Tiny-bitLib
https://github.com/YahboomTechnology/Yahboom_IR
AI vision function for Tiny:bit Pro library
https://github.com/YahboomTechnology/K210-Module.git
Tiny:bit's block is added.
Various basic sample codes for Tinybit Pro are uploaded below.
RGB-light-exchange-lighting: https://makecode.microbit.org/_EL3LmqJTwKKT
Car-move-control-speed: https://makecode.microbit.org/_9oJaEzErWisY
Ultrasonic-avoid-with-light-sound: https://makecode.microbit.org/_P7WYcMXvUTqt
Voice control light: https://makecode.microbit.org/_KDDPHmJcaRut
Spinning top: https://makecode.microbit.org/_Wv0dPq5K8bFV
Various AI vidsion sample codes for Tinybit Pro are uploaded below.
Color recognition-Microbit car code: https://makecode.microbit.org/_1p84eJ9VxUkK
Color recognition-K210 module code:
from modules import ybserial
import time
serial = ybserial()
lcd.init()
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.skip_frames(time = 100)
sensor.set_auto_gain(False)
sensor.set_auto_whitebal(False)
clock = time.clock()
print("Hold the object you want to track in front of the camera in the box.")
print("MAKE SURE THE COLOR OF THE OBJECT YOU WANT TO TRACK IS FULLY ENCLOSED BY THE BOX!")
# Capture the color thresholds for whatever was in the center of the image.
# 50x50 center of QVGA.
r = [(320//2)-(50//2), (240//2)-(50//2), 50, 50]
for i in range(50):
img = sensor.snapshot()
img.draw_rectangle(r)
lcd.display(img)
print("Learning thresholds...")
threshold = [50, 50, 0, 0, 0, 0] # Middle L, A, B values.
for i in range(50):
img = sensor.snapshot()
hist = img.get_histogram(roi=r)
lo = hist.get_percentile(0.01) # Get the CDF of the histogram at the 1% range (ADJUST AS NECESSARY)!
hi = hist.get_percentile(0.99) # Get the CDF of the histogram at the 99% range (ADJUST AS NECESSARY)!
threshold[1] = (threshold[1] + hi.l_value()) // 2
threshold[2] = (threshold[2] + lo.a_value()) // 2
threshold[3] = (threshold[3] + hi.a_value()) // 2
threshold[4] = (threshold[4] + lo.b_value()) // 2
threshold[5] = (threshold[5] + hi.b_value()) // 2
for blob in img.find_blobs([threshold], pixels_threshold=100, area_threshold=100, merge=True, margin=10):
img.draw_rectangle(blob.rect())
img.draw_cross(blob.cx(), blob.cy())
img.draw_rectangle(r, color=(0,255,0))
lcd.display(img)
print("Thresholds learned...")
print("Start Color Recognition...")
while(True):
clock.tick()
img = sensor.snapshot()
for blob in img.find_blobs([threshold], pixels_threshold=100, area_threshold=100, merge=True, margin=10):
img.draw_rectangle(blob.rect())
img.draw_cross(blob.cx(), blob.cy())
x = str(blob.x())
y = str(blob.y())
w = str(blob.w())
h = str(blob.h())
print(threshold)
if len(x)<3 :
i_flag = 3-len(x)
x = "0"*i_flag + x
if len(y)<3 :
i_flag = 3-len(y)
y = "0"*i_flag + y
if len(w)<3 :
i_flag = 3-len(w)
w = "0"*i_flag + w
if len(h)<3 :
i_flag = 3-len(h)
h = "0"*i_flag + h
send_data ="$"+"01"+ x+','+ y+','+ w+','+ h+','+"#"
#print(send_data)
for i in range(1,5):
serial.send(send_data)
time.sleep_ms(5)
lcd.display(img)
#print(clock.fps())
Handwritten_digital_control-Microbit car
code: https://makecode.microbit.org/_7e82r50rpfzC
Handwritten_digital_control-K210 module code:
from maix import KPU
import gc
from modules import ybserial
import time
serial = ybserial()
lcd.init()
sensor.reset()
sensor.set_pixformat(sensor.RGB565)
sensor.set_framesize(sensor.QVGA)
sensor.set_windowing((224, 224))
sensor.skip_frames(time = 100)
clock = time.clock()
kpu = KPU()
kpu.load_kmodel("/sd/KPU/mnist/uint8_mnist_cnn_model.kmodel")
msg_ =""
while True:
gc.collect()
img = sensor.snapshot()
img_mnist1=img.to_grayscale(1)
img_mnist2=img_mnist1.resize(112,112)
img_mnist2.invert()
img_mnist2.strech_char(1)
img_mnist2.pix_to_ai()
out = kpu.run_with_output(img_mnist2, getlist=True)
max_mnist = max(out)
index_mnist = out.index(max_mnist)
msg_ = str(index_mnist)
send_data ="$"+"11"+ msg_ +','+"#"
time.sleep_ms(5)
serial.send(send_data)
score = KPU.sigmoid(max_mnist)
if index_mnist == 1:
if score > 0.999:
display_str = "num: %d" % index_mnist
print(display_str, score)
img.draw_string(4,3,display_str,color=(0,0,0),scale=2)
elif index_mnist == 5:
if score > 0.999:
display_str = "num: %d" % index_mnist
print(display_str, score)
img.draw_string(4,3,display_str,color=(0,0,0),scale=2)
else:
display_str = "num: %d" % index_mnist
print(display_str, score)
img.draw_string(4,3,display_str,color=(0,0,0),scale=2)
lcd.display(img)
kpu.deinit()
Tiny:bit Pro car is equipped with a K210 vision module, which has built-in vision functions such as face recognition, mask recognition, barcode and QR code recognition, feature detection, number recognition, color recognition, and road sign recognition.
Using it, you can enjoy more gaming fun!