



Yahboom offers a variety of kit for choice.
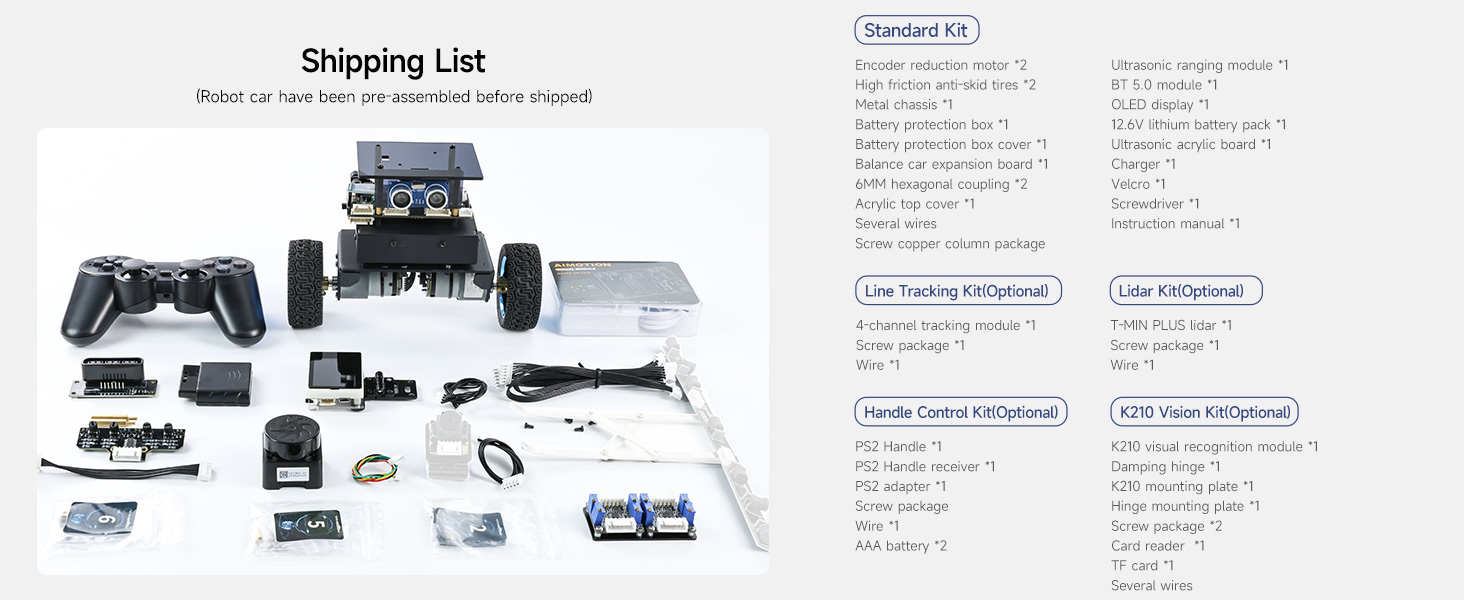


Add handle, receiver and adapter plate based on the standard kit. As shown below.

Add 4-channel tracking module based on the standard kit.

Add K210 vision module based on the standard kit.

Add lidar module based on the standard kit.
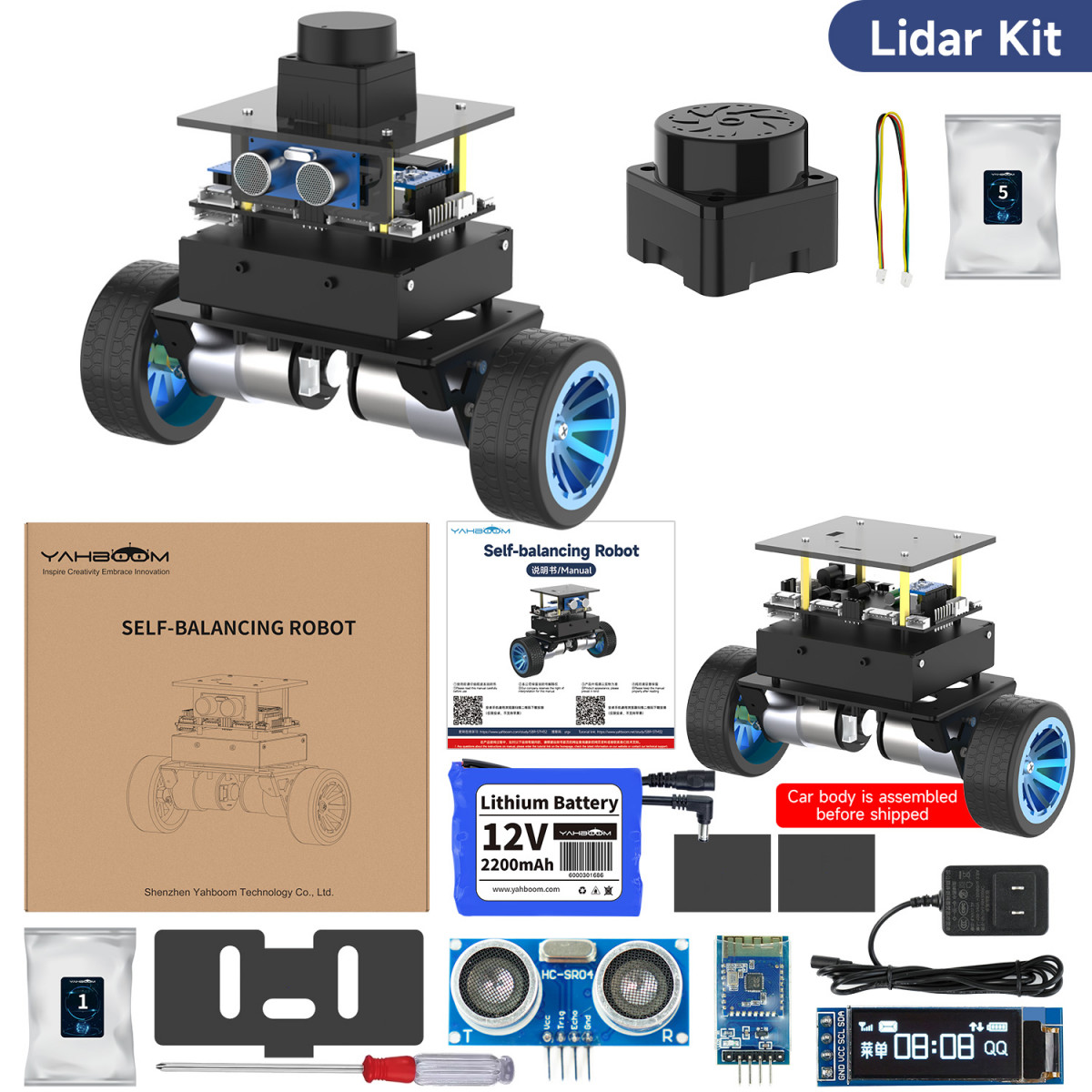
The chassis, motor, tires, and battery protective box of the car are already assembled before shipped. Users only need to complete the assembly of the upper part according to the installation video or assembly steps in the instruction manual we provided.
This is the chassis of the car (including the battery box, motor, and tires). You can see that the chassis of the car is made of metal as the main structure, which is sturdy and durable.



Driver board as shown in the figure below. It is installed in the middle layer of the robot car.
The expansion board with STM32 core control unit and a motor drive circuit on board, and also provides: PS2 handle receiver, OLED display, lidar, Bluetooth, CCD camera, electromagnetic line tracking, ultrasonic, K210 visual module, 4-channel line tracking module and other peripheral interfaces. We have pre-installed an MPU6050 sensor module on the drive board.


Users need to insert OLED display, ultrasonic module, and Bluetooth 5.0 module by themselves.

The OLED display is used to display the current mode, battery voltage and other data, so that developers can grasp the real-time status of the car at any time.

Based on the data detected by the ultrasonic sensor, robot car can realize ultrasonic ranging, obstacle avoidance, and following functions.

The Bluetooth 5.0 module can realize the mobile phone APP remote control function. When the mobile phone APP is close to the car, it can be automatically paired. Users can view waveform data such as the accelerometer gyroscope battery voltage in the APP. In addition, the app can also be used for PID quick parameter adjustment.

The Bluetooth APP interface is shown as follows.
As shown below is main control interface. We can control car movement on this interface.

As shown below is PID debugging interface. You can debug the balance loop PID, speed loop PID and steering loop PID respectively.

As shown below is waveform display interface. Display the waveform data changes of acceleration, gyroscope and battery voltage.

After the assembly is completed, we can experience the robot car. The APP remote control program is pre-installed before shipped. It contains multiple functions.
Users only need turn on the power switch to experience robot car. Then, turn the wheel to switch different function modes.
Standard kit can experience APP control, ultrasonic avoiding mode, ultrasonic following mode, loading mode.

State detection: With the help of high-performance six-axis IMU, the car can detect the current state and determine whether to turn on the automatic balancing system.
Climbing: With its excellent balancing ability and powerfu power system, the balance car can easily overcome the challenge of a slope of about 30°.
If you purchase different kit, you can realize following more functions.
A---Tracking Line Self-balancing Robot Car
Equipped with 4-channel tracking sensor modules, it can accurately identify and follow the preset route. Coupled with intelligent algorithms, the balance car can remain stable during driving and ensure that every turn and forward movement is smooth and natural.

B---PS2 Handle Self-balancing Robot Car
Robot car can be remotely controlled through PS2 handle, move forward, backward, turn left and right, and also control the speed.

C---K210 Vision Self-balancing Robot Car
Equipped with the K210 vision module, the balance car can recognize colors, obiects, QR codes, etc., obtain data through the serial port and make corresponding decisions.

D---Lidar Self-balancing Robot Car
Based on lidar ranging function, it can realize advanced functions such as lidar driving in a straight line along the wall lidar obstacle avoidance, lidar guard, lidar tracking, lidar patrol, etc.

STM32 self-balancing robot car is an innovative smart car based on the STM32 microcontroller, designed for exploring robotics and control systems. It is not only a toy, but also a learning and experimental platform suitable for educational institutions, enthusiasts and researchers. Yahboom design the multi-function expansion board, 6-axis attitude sensor, high-power motor, and metal chassis for it. Through the accelerometer and gyroscope, robot car can monitor its own tilt angle and motion state in real time, quickly adjust motor speed to achieve a stable balance state through precise PID control algorithm. Not only that, this self-balancing robot car also supports a load of 4KG and can move freely in various complex terrains.