



【Powerful ROS Master】
3 ROS master controllers are available,equipped with Jetson Nano 4GB,Orin Nano and Orin NX development boards,which inject more powerful performance into DOFBOT-PRO greatly improving its AI performance in multiple fields such as mechanical control.AI vision applications and 3D depth,and making image recognition processing smoother.Support MediaPipe develop and Movelt.
【New 3D Space Tech】
DOFBOT-PRO is equipped with a 3D depth camera.Combining 3D vision tech with robotic arm control to achieve depth distance measurement,recognition,and height measurement.Use the robotic arm to identify,track,and grab target objects in three-dimensional space.Through the inverse kinematics algorithm,DOFBOT-PRO realizes high-level AI projects such as arbitrary grasping,sorting,and handling in 3D space.Play with 3D AI vision!
【Cross-Platform Robot Control】
Provides Yahboom Robot APP control (compatible with Android),wireless handle,robot operating system (ROS) and keyboard,allowing you to control the robot as you wish.
【Hardware Configuration】
The flagship version is equipped with a 10.1-inch high-definition IPS display and supports free angle adjustment;it includes a 6DOF visual robotic arm,uses an intelligent serial bus servo and is equipped with a binocular 3D depth camera at the end of the robotic arm.The measurement range can reach 5 meters,accurate measurement,and provides a first-person perspective to realize high-level AI projects in three-dimensional space.
【What will you get?】
You will get a programmable metal structure robotic arm,and you need to assemble the main control,expansion board,and display by yourself.With rich tutorials and open source code, DOFBOT PRO is the perfect platform for learning AI visual 3D depth point cloud,where you can learn ROS,Python programming, Open CV technology,and AI vision,shorten the project development cycle, and fully experience AI!
We provide two versions kit and three main control boards option. Users can choose according to their needs and budget.
Standard Version:

Ultimate Version:

The product shipping list contains the following content.

If you choose the Ultimate version, your package will also include the following content.

If you choose a different Jetson development board, your package will include the following content.



We provide customers with assembly videos and instruction manuals, so users can complete the assembly quickly.
We provide customers with assembly videos and instruction manuals, so users can complete the assembly quickly.
We provide customers with assembly videos and instruction manuals, so users can complete the assembly quickly.
We provide customers with assembly videos and instruction manuals, so users can complete the assembly quickly.We provide customers with assembly videos and instruction manuals, so users can complete the assembly quickly.We provide customers with assembly videos and instruction manuals, so users can complete the assembly quickly.We provide customers with assembly videos and instruction manuals, so users can complete the assembly quickly.
◆DaBai DCW2 Depth Camera

The camera parameters are as follows:

◆High quality bus servo

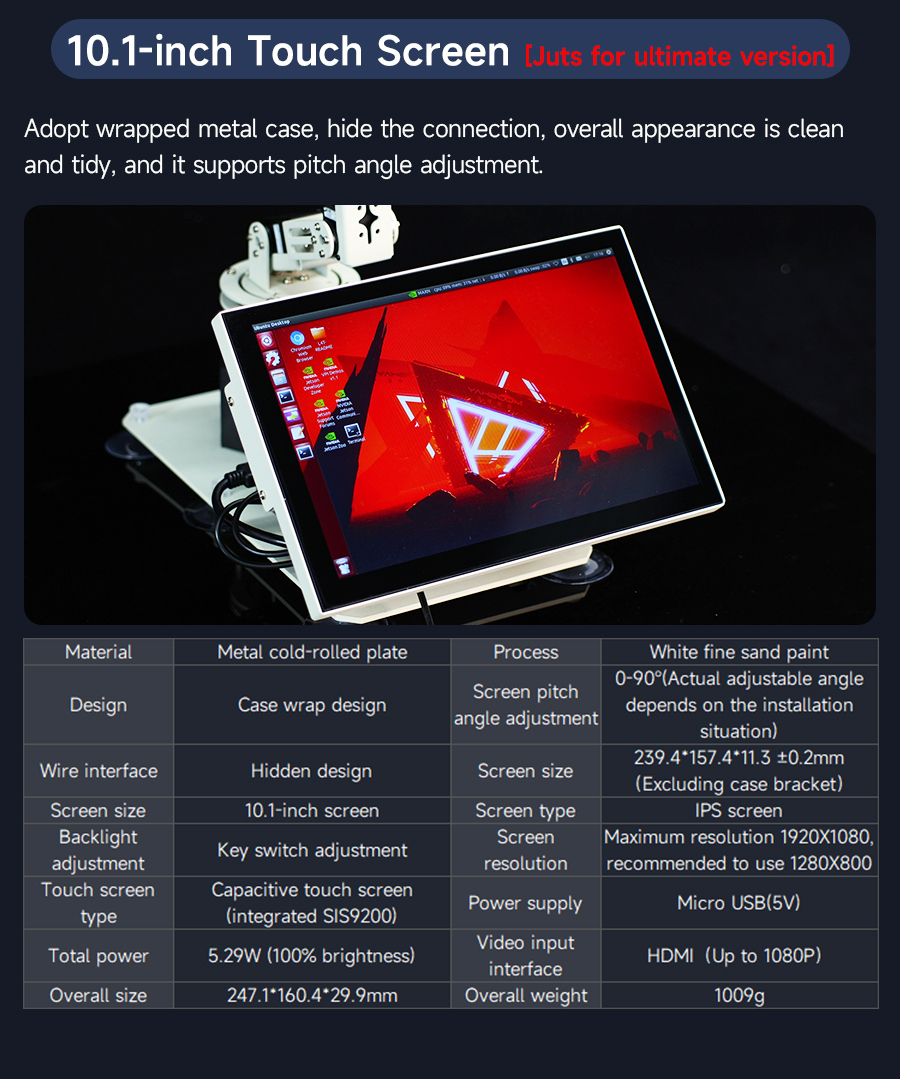
◆10.1-inch Touch Screen Display
DOFBOT-PRO is developed using ROS robot operating system, which is an open source operating system for robots. lt provides the services that an operating system should have, including hardware abstraction, implementation of common functions for underlying device control, inter-process messaging, and package management. lt also provides tools and library functions for acquiring, compiling, writing, and running code across computers.
The system versions used by the three development boards are different.
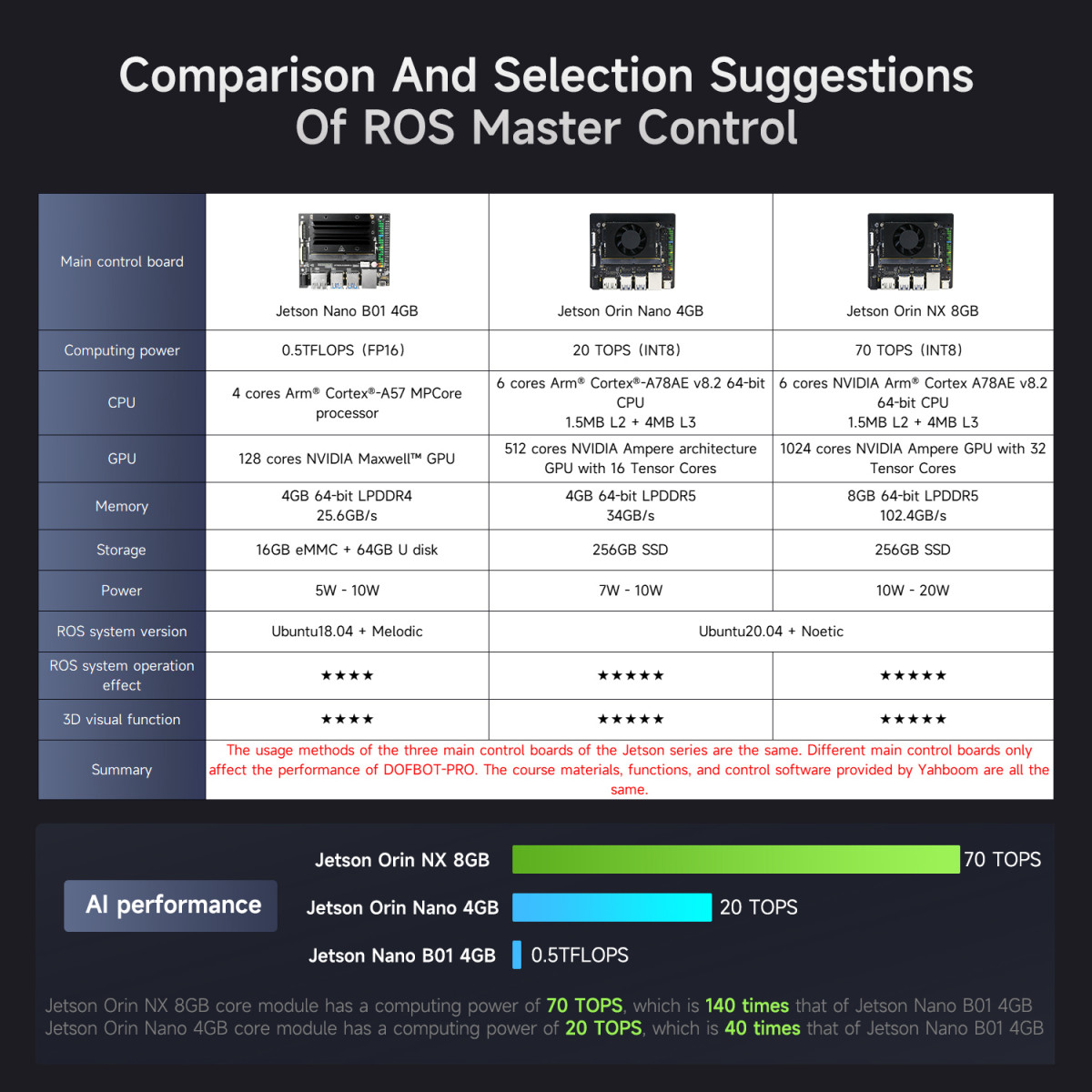
Note:Since the computing capabilities of the three development boards are different, some functions of DOFBOT-PRO are different when using different development boards.
Adopt wrapped metal case, hide the connection, overall appearance is clean and tidy, and it supports pitch angle adjustment.
✔Depth Vision Arm-camera integration
The end is equipped with a high-performance binocular structured light depth camera, which enables DOFBOT-PRO to calculate the distance, shape, height volume and other information of the object in 3D space based on the RGB data, position coordinates and depth information of the target object, thereby improving the autonomy and intelligence of the robotic arm to achieve more Al projects.

3D depth point cloud recognition
DOFBOT-PRO can obtain the depth map, color map, and point cloud map of the detection environment through the corresponding APl of the depth camera. Then, obtain the RGB data, position coordinates, and depth information of the target object.

Depth camera distance measurement
By obtaining the depth point cloud data of the object, the distance between the object and the depth camera can be obtained. Then, the object can be located, sorted, and tracked in 3D space.

Target object height measurement
By obtaining the depth point cloud data of the object, the height of the object can be identified. Then, objects with abnormal height can be removed.

Regional target volume measurement
By obtaining the depth point cloud data of the object, the shape and height of the object can be identified. Then, the volume of the object can be measured.

✔Sorting And Gripping In 3D Space
Sorting and gripping in 3D space [machine code/shape/color]
By calculating the 3D coordinates of the machine code in the image, the robotic arm can sort it to the specified location according to the machine code content. (The shape and color sorting process principles are the same.)

Garbage sorting
Yahboom provides blocks with garbage patterns. By loading the corresponding model, DOFBOT-PRO can quickly identify different "garbage" and place them in the corresponding classification area.

✔Tracking And Gripping In 3D Space
Tracking and grasping in 3D Space
Hold the block and move it in front of the robotic arm, robotic arm will track the block. When the block stops, the robotic arm will grab it and place it in the corresponding position.

KCF tracking and grasping
Through the KCF algorithm, the robotic arm can track the specified target object. When the target is stationary, the robotic arm will grab the target and place it at the corresponding position.

Movelt Simulation Control
DOFBOT-PRO supports Movet simulation, which can control the robotic arm and verify the algorithm in a virtual environment. Effectively reducing the requirements for the experimental environment and improving experimental efficiency.

URDF kinematics simulation model
Simulate according to the model of the real object in proportion, use the Movelt tool for visual control. Can realize dragging, preset position control, robotic arm movement obstacle avoidance and other functions.

Movelt simulation control/trajectory planning
When controlling the robotic arm movement in the simulation interface, the real robotic arm can make corresponding movements.

Color block sorting
Place the block in the map recognition area, robotic arm will automatically distinguish the current color and grip the block to the corresponding color area on the map.

Face recognition and tracking
Detect whether there is a face in the current picture, mark and follow it after recognizing the face.

DOFBOT-PRO support APP, handle and PC web control.
Mobile phone APP:

USB wireless remote control:
Web control:

Dofbot Pro is a 6DOF 3D vision robotic arm, equipped with a binocular structured light 3D depth camera. The unique structural design integrates the robotic arm with 3D vision. It can accurately identify the shape, distance, height, and even volume of objects. Supports calculating the position of objects in three-dimensional space, achieve accurate positioning, grasping and tracking objects.
Compatible with Jetson NANO B01, Jetson Orin NANO 4GB, Jetson Orin NX 8GB board. Through the GPU of the Jetson board for machine learning model inference, DOFBOT PRO can realize garbage/color/object recognition, etc. Support adding 10.1-inch touch screen to facilitate user development and debugging ROS robots. By integrating the ROS robot operating system and inverse kinematics algorithm, simplifies the complex motion control of 6DOF robotic arm, and can realize robot coordinate control, motion planning, robot collision detection, gripping and sorting, etc.
Overall, DOFBOT Pro is a flexible platform for ROS education and research.