



YAABR - Yet another Arduino based robot
YAABR is my first Arduino based robot. The name is an abbreviation for yet another Arduino based robot. It is a multipurpose platform for experimentation. With its Bluettoth Interface it can be controlled remotely from a PC oder a PDA, it it also possible to reprogram the main controller over Bluettoth, no cable needed.
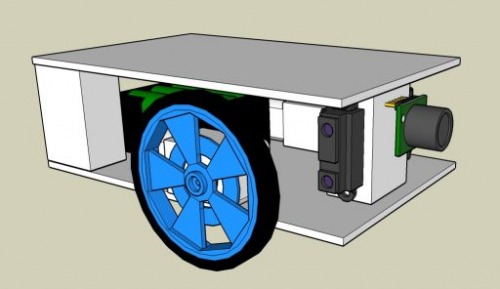
Construction Update!
For the first time I am creating a robot with a CAD program. I use Google SketchUp for this. OK, some changes were made during design, but the main construction is the same.
Processors
For processing it has an Arduino BT as main controller and an Baby Orangutan B-168 as motor controller. The motor controller is programmed as a I2C Slave device. All coding has been done in Arduino C/C++.
Sensors
At the moment:
- Sharp GP2D12 IR range detector
- a linefollower sensor build from 2 CNY70 IR reflex optocouplers.
later on:
- wheel encoders will be added to the motor controller.
- a pan/tilt camera head with a wireless camera
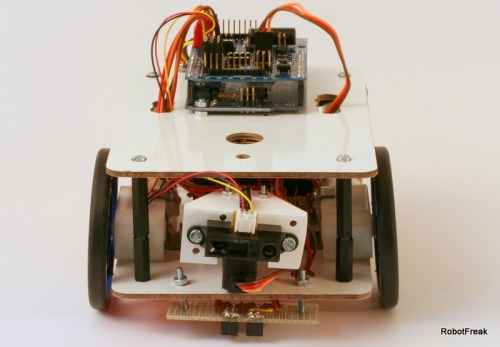
Actors
The GM9 motors build the base driving system.
In its finished state the robot will have 4 servos. At the moment there is only one servo for the Sharp IR sensor. The other servo were planned for a pan/tilt camera head and a pen up/down holder.
A BlinkM "smart LED" will illuminate the robots underground.
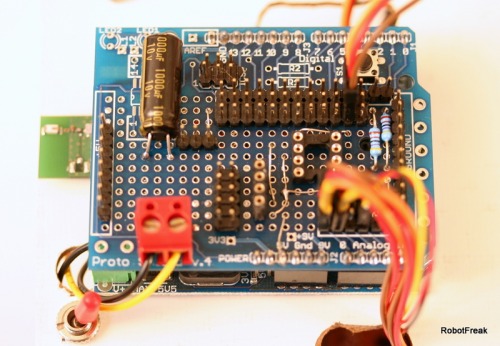
Proto Shield
The Protoboard shield on the Arduino BT has a seperate power supply input (4,8V) for the servo motors. Standard 3 pin Headers (Signal VCC, GND) are available for all digital and analog ports. Two I2C headers and a spare 8pin DIP for a I2C EEPROM are also available.
Sorry folks, no video available at the moment. I just started beginning programming.
Line following, can be remote controlled via Bluettooth
- Actuators / output devices: 1 Servo, 2x GM9
- Control method: Bluetooth
- CPU: Arduino BT, Baby Orangutan B-168
- Power source: 6xAA NiMH
- Programming language: Arduino
- Sensors / input devices: Sharp IR, 2 CNY70 line follow sensors
- Target environment: indoor