


W.A.L.T.E.R. v2.x
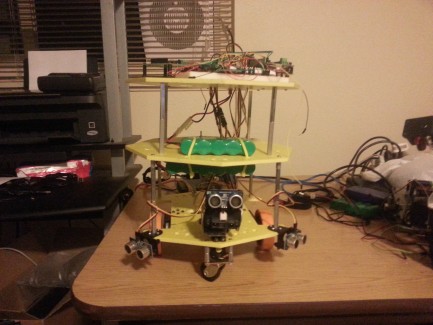
This is a complete rebuild from v1.x, as you can see. This robot is much larger, and much more complex than v1.x was. I designed the decks using 3D CAD and had them cut by a friend on his CNC.
I added a breadboard on the top deck for experimental cicuitry - it's got a DS1307 RTC, IMU, TCS34725 RGB Color sensor, TMP006 Heat sensor, four digit 7-segment display, and an 8x8 matrix display on it right now. All of these are I2C devices. I use a lot of I2C devices because Linux doesn't require root access to use I2C. I do all my development under Linux (Kubuntu 14.04 currently). I usually get everything working with an Arduino first, and then connect everything to a small Linux SBC and test it there too.
It's got two 50:1 gear head motors with encoders (Lynxmotion GHM-04 plus QME-01) and a RoboClaw 2x5 smart motor controller, instead of continuous rotation servos, for locomotion. There is a separate servo controller (Lynxmotion SSC-32) for handling the servos, an Arduino Mega ADK for the main brain, and a Lynxmotion BotBoarduino to handle auxiliary sensors, sound, and other stuff. Right now, there is way too much load on the Arduino Mega ADK, and sensor readings are not being taken often enough, so I will offload some sensor handling and sound output to the BotBoarduino, which will probably be accessed as an I2C device.
I'll add a Raspberry Pi, BeagleBone Black, or UDOO Quad at some point to replace the Arduino Mega ADK as the main brain. I've currently got two NiMH batteries on here for power - 6V@2800 mAH for the servos and servo controller, and 7.2V@2800 mAH for the motors and motor controller.
There are a total of three distance sensors on W.A.L.T.E.R. 2.0 now - three PING ultrasonic sensors and one Sharp IR sensor. One PING and the Sharp IR sensor are on the front pan/tilt. The other two PING sensors are either side of front center.
It's not fully operational at this time.