



voodoobot
Alrighty, so this is the slapped together voodoobot(not running just yet). I'm working on a possible conversion to a tracked version(using vex track kit) for ease of movement vs wheeled motion(3 point turns are a pain) but will do a test with the wheels.
[The start]

So originally this was one of those rc spycars, came with a micro vid transmitter and reciever(on the radio transmitter). I've pulled the electronics from the main boards and am working on making it standalone so I can integrate it into future projects. Not bad for a car that was $50 on amazon when it was on sale. A note on the reciever, the board for the camera had a couple of interesting pins, data,1,2,3 and audio pins that are not being used....If I ever find any info on these, I'd love to integrate them.
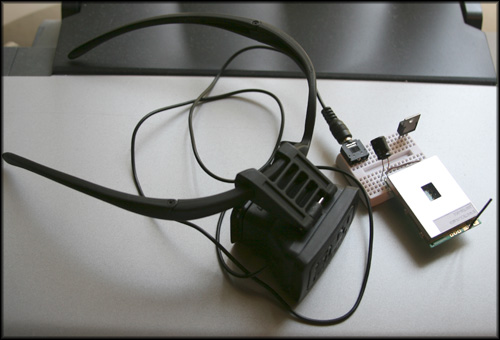
Also, there is a way to integrate a standard rca connector onto this device for video output to a tv(ntsc or pal). If I can, I'll see about setting this up so I can capture some video...this would be pretty cool. :)As it is, I just have the glasses headset.
-[Work in progress]-
So far, I've gutted the shell, removed all of the electronics and am looking to fit my gear in it for some test runs.I'm loooking to possibly salvage the motor driver as it worked well with the car.
As I mentioned before, I'm going to try to use the wheels first, but I don't like the fact that the rear is a solid axel. I'm used to a rear diff setup(offroad rc cars) but this still has some potential. The front steering is a bit shallow, so that will have to be modified to allow for a tighter turning radius. I'll be adding the steering setup from an rc car.
I'm also waiting on some electronics from mouser for the vid gear.
The placement of the ir sensor in the front mid section seems to work and doesn't get affected by the low slope of the body. It'll be a fixed positsion sensor and only check for direct frontal obstacles.
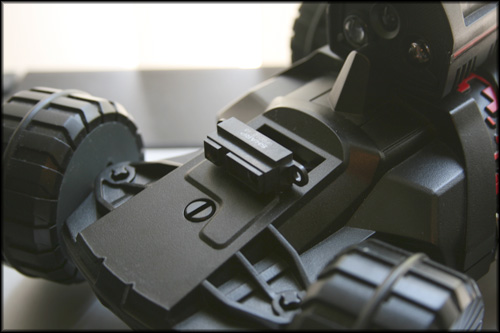
The ping sensor was just placed on top of the cam as a test location(double stick tape, yay).I've got some ir detectors that I'll be using for a future project where this bot will be navigating based on a series of beacons(sentry style). This will most likely placed on the same mount as the ping sensor.

The camera placement will most likely stay in the back and since it can be angled up, it shouldn't be an issue for it being so far back.depending on if I want the camera to be movable(rotated around)I may pull it out of the houseing. One note, the housing contained a large IR transmitter that wasn't connected, so thats going to be another item to hookup and see how it affects night vision. It'll be trigered by an ldr so it's not on all of the time.
I'm looking at making a couple of the FritsLDR sensors from the direct front spanning out like a V to detect large objects in front of the wheels. One would also be pointing directly in front to detect either a large obstical or nothing.....goatta avoid holes and such!Also may add one additional one to the rear.
As I don't have a lot of time, this project is not going to be updated that often, but I will add progress as I get things up and running.
transmits video, uses multiple types of sensors for navigation
- Control method: autononmous, possible rf/rc
- CPU: Picaxe 14m, picaxe08m(multiple), possible bs2
- Power source: 6xAA
- Programming language: picbasic/pbasic
- Sensors / input devices: PING))) sonar, gp2d12 sensor, FritsLDR
- Target environment: indoors/outdoors/small areas