



Vagabundo - my TI Launchpad wanderer
Hey there, this is my wanderer robot based on TI Launchpad, it builds on a tip about reading distances that come encoded in pulse width that i posted earlier.
The wheels are 2 cds with some rubber stripe hot glued to make tires.
I modified 2 micro servos for continous rotation and use those to drive the wheels.
The boddy is an old tupperware box.
My objective is to make it a vacuum cleaning robot, so i will start experimenting with floor coverage algorithms.
Here's the idea:
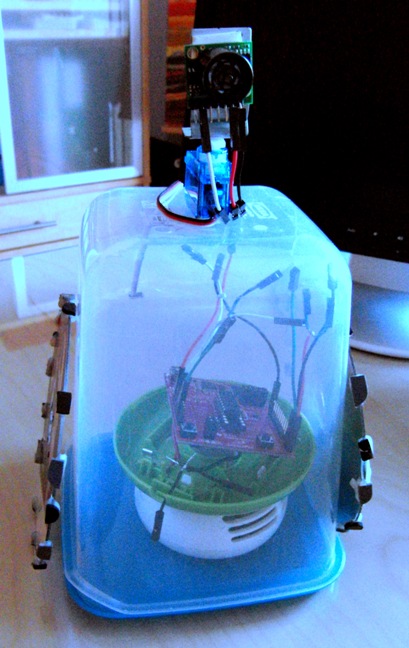
Wanders around, avoids walls via ultrasound, will clean the floor
- Actuators / output devices: 3x micro servo (2 modified for continuous rotation)
- Control method: autonomous
- CPU: TI Launchpad (MSP430G2211)
- Power source: 3x AAA (works on 2X AAA as well)
- Programming language: C
- Sensors / input devices: Maxbotix EZ1 sonar
- Target environment: indoor