


Vac-Bocks
It has a funky name because I like funky names. Otherwise, it's ultimately just a box, with four cpu fans to create suction, and move around and bump into things to avoid them.
I want it to be square, because - corners in the house are square. It's just stupid to make a round vacuum cleaner (in my opinon...)
I want omni directional because I want it to be able to follow a wall to the corner, then move along the next wall without having to turn.
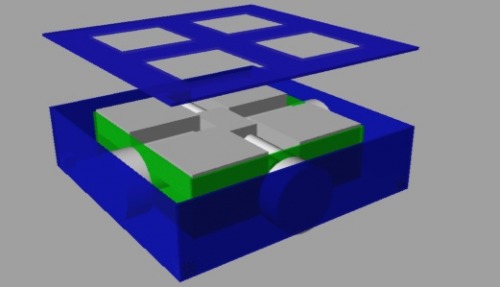
So here is a rough idea of what I hope it will look like. The top panel is pulled up to see the guts of it.
blue outer box is just a place to hang the bumper switches and to stop the wheels tangling in small children. The green inner box is where the batts, motors etc hang out. The four grey boxes represent the four 6cm cpu fans, and the smaller grey box in the middle is a protection for the cpu - I imagine it will get dusty in there.
The four small cubes in the bottom corners of the big blue box are the cliff detectors.
My problem:
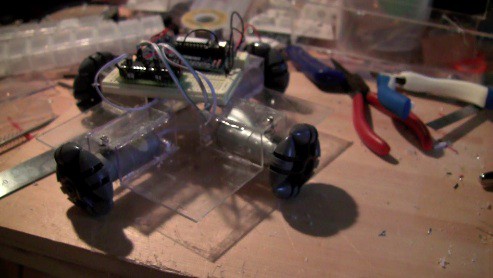
The omniwheels I have are not quite gripping the floor. The rollers on the omnis are hard plastic though - so I suppose it's expected.
I tried to mitigate the problem by suspending all four wheels, while this worked a bit, it didn't work entirely. Simply adding more weight also helped, but then it gets heavy, which means the power losses will be higher. Ideally, I want omniwheels with rubber rollers - I'm checking with DAGU to see what they have.
Update 28th Oct.
It turns out that DAGU don't stock omnis with rubber rollers, so I've ordered a bunch from
http://www.kornylak.com/wheels/transwheel-specifications.html
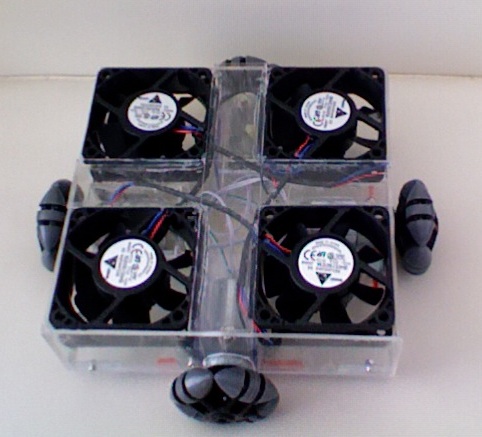
I mounted the fans, and bolted the side panels on. I have a bit of an aversion to using hot glue to hold things together, especially if they're going to vibrate a bit- so I have to think of a better way to mount the four fans. Anyhow, The sides of the inner box are bolted on with small angle brackets and 2x10mm bolts. The gaps in the joining are small enough to be sealed with hot glue - hopefully I can make it neat enough.
I'm so bustin' out wit mah fully sick ride yo.
Vaccums the floor.. in the future
- Actuators / output devices: four geared motors - nothing else at present.
- Control method: fully autonomous
- CPU: 18X
- Power source: whatever batts I have that add up to 9v.
- Programming language: picbasic
- Sensors / input devices: bumper switches, cliff detectors
- Target environment: indoor flat surfaces