


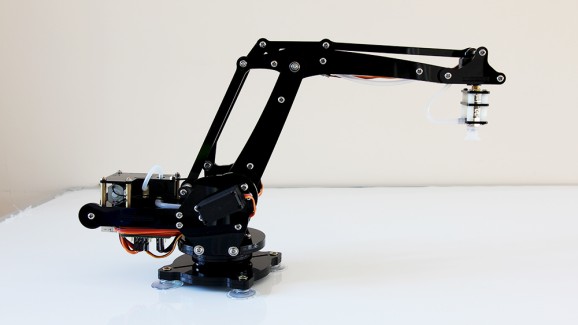
uArmⅠ:An open source robot arm project
uArm is a 4-axis parallel-mechanism robot arm, inspired by the ABB PalletPack industrial robot arm IRB460.
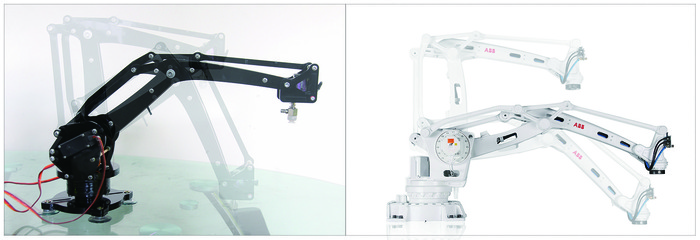
It is made up of laser cut acrylic or wood parts, powered by standard RC hobby servos, and controlled by an Arduino-compatible board. In parallel-mechanism robot arm, most of the masses concentrate on the base, making the robot much more stable and allows the upper Arm to react really fast.
An open source robot arm